
- Speed and swath width increase together at low speeds but reach an asymptote around 8 m/s; further speed increases do not widen swath.
- Two T100 configurations compared: Hybrid (four sprinklers, 350 µm) and Orchard (two misters, two sprinklers, 500 µm).
- ANOVA showed flight speed had no significant effect on swath width for either configuration, while deposit-density measurements revealed more variability.
- Mister nozzles produced 55% more downwind deposits than Sprinkler nozzles, suggesting mister nozzles produce finer droplets despite being programmed to deliver the largest size.
This text was generated by OpenAI GPT 5 Mini
Speed Study
Swath width is a fundamental parameter in spray drone mission planning. It facilitates the uniform application of broadacre pesticides at the target rate. Pilots adjust the swath width via operational settings such as droplet size, flight speed and altitude to produce the most effective and efficient application.
Rapid advances in drone design, however, may warrant a re-evaluation of how operational settings affect swath width. For example, the most recent generation of drones are now capable of speeds up to 20 m/s (72 km/h), which is twice that of the previous generation.
In late 2025 we conducted a series of comparative herbicide applications using the DJI Agras T50 and T100. For both drones, swath width increased with speed up to ~10 m/s, as expected. However, between ~10 m/s and 18.5 m/s, swath width from the T100 did not seem to increase further. Similar observations have been reported by researchers at AgroEfetiva (São Paulo, Brazil; personal communication).
These results suggest that the relationship between speed and swath width is positive and direct at lower speeds, but reaches a saturation point beyond which any further increase in speed no longer affects swath width. This is an asymptotic relationship. To test this hypothesis, we conducted a deposition study where swath width was measured at flight speeds that increased incrementally from 8 m/s to 20 m/s.
Configuration Study
The standard T100 configuration uses two rotary atomizers (“sprinkler” nozzles; LX07550SX) with a reported maximum combined flow rate of 30 L/min. The alternate orchard configuration incorporates a boom that supports two additional “mister” nozzles (LX09550SX), increasing the reported maximum flow rate to 40 L/min.
To improve productivity in broadacre applications, some operators have adopted a hybrid configuration. In this setup, the orchard boom is retained, but the reputedly drift-prone mister nozzles are replaced with a second set of sprinklers. This approach is intended to achieve a higher flow rate than the standard two nozzle configuration while maintaining a larger mean droplet size.
A secondary objective of this study was to compare the Hybrid configuration with the Orchard configuration (Figure 1).

Materials and Methods
Location and Layout
The study was conducted at Ontario’s Simcoe Research Station on May 12, 2026. The site (42.857414, -80.271759) was a flat, recently tilled sand/loam field with no vegetation present. A DJI Agris T100 drone was used to perform the spray applications, supported by the D-RTK 3 relay station and flown on full auto.
The spray mix was 0.2% v/v Super Signal Blue (Precision Laboratories) and 0.125% v/v Activate Plus NIS (Winfield United) in municipal water, pre-mixed to ensure consistency. A volume of 40 L – 60 L was maintained throughout the trial to minimize the effect of a changing payload.
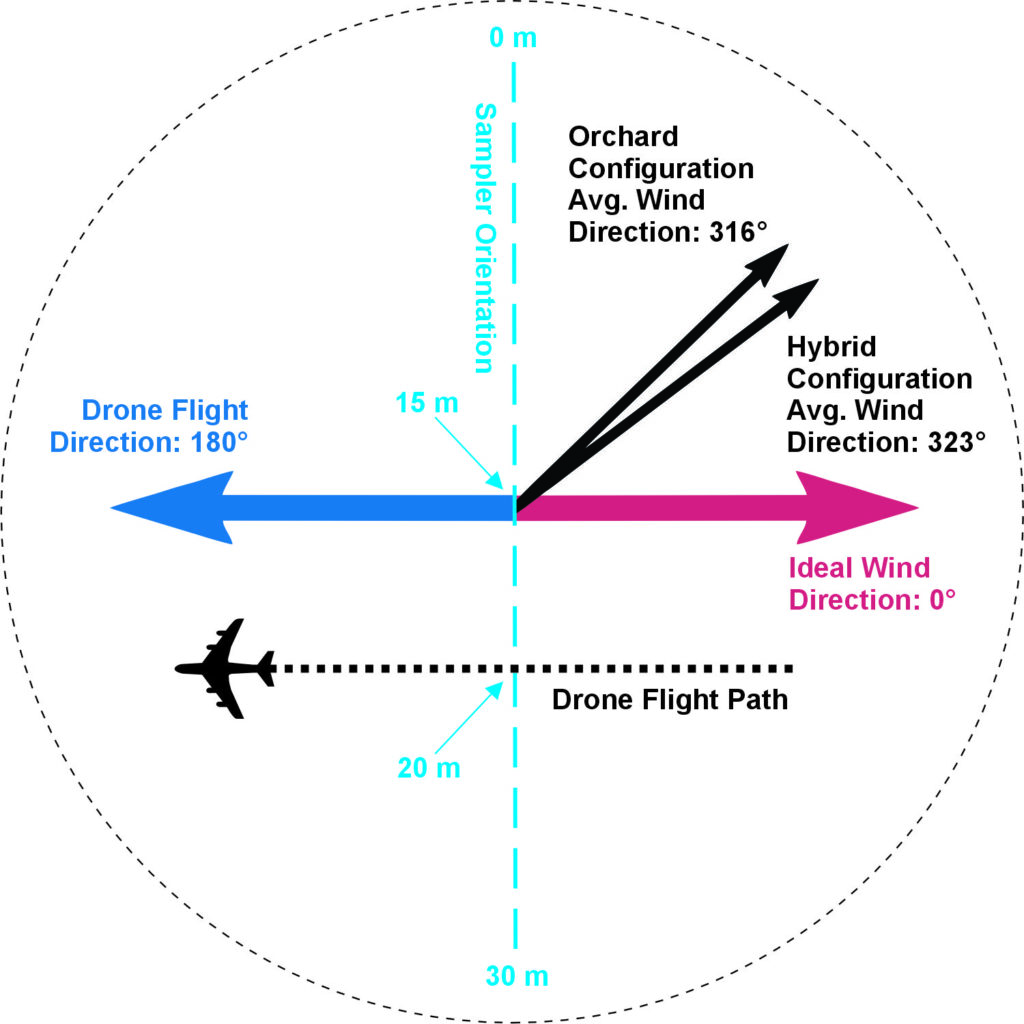
The sampler was a flat, horizontal, continuous bond paper strip measuring 7.5 cm wide and 30 m long (secured in Speed Tracks™, Application Insight LLC). The sampler was oriented perpendicular to the prevailing wind, with the intention of flying the drone with a headwind across the 15 m mark (the centre) (Figure 2). Test passes determined that the T100 required 210 m to reach 20 m/s while half-full.

Before the swathing runs began, the prevailing wind shifted direction slightly. It was decided to fly the drone 5 m upwind (at the 20 m mark along the 30 m sampler) to ensure any downwind displacement was captured on the sampler (Figure 3).
Drone Settings and Swathing Order
The primary objective of the study was to explore the effect of flight speed on swath width. Speed was increased from 8 m/s to the maximum 20 m/s by 2 m/s increments. Trial and error with the controller indicated that we could achieve these speeds by balancing an application volume of 30 L/ha and a programmed swath width of 7 m.
Altitude was set to 4 m which is lower than the 5 m minimum recommended by DJI for high-speed flight. This was a compromise above the preferred 3.5 m altitude we have historically used with the T50. It was felt that higher altitudes would create unacceptable potential for swath displacement.
Rotary atomizer design is not standardized, and as a result, the droplet size selected on the controller did not necessarily produce the desired results. The Hybrid configuration was programmed to emit 350 µm droplets, selected as a compromise between drift mitigation and coverage potential. To offset the Mister nozzles’ reputation for producing a finer spray, the Orchard configuration was set to the maximum 500 µm. Operations settings are noted in Table 1.
| Configuration | Nozzle | Droplet size (µm) | Speed (m/s) | Altitude (m) | Programmed Swath Width (m) | Application Volume (L/ha) |
| Hybrid | 4 Sprinklers | 350 | 8, 10, 12, 14, 16, 18, 20 | 4 | 7 | 30 |
| Orchard | 2 Misters, 2 Sprinklers | 500 | 8, 10, 12, 14, 16, 18, 20 | 4 | 7 | 30 |
Three repetitions of seven speeds were flown for each configuration. Anticipating an increase in temperature and wind speed throughout the day, it was decided move through all seven speeds (a single repetition) before resetting and doing so two more times. The intent was to preclude confounding weather effects. Ideally, we should have alternated between configurations as well, but this proved impractical. As a result, we flew the Hybrid configuration first and the Orchard configuration last.
Weather
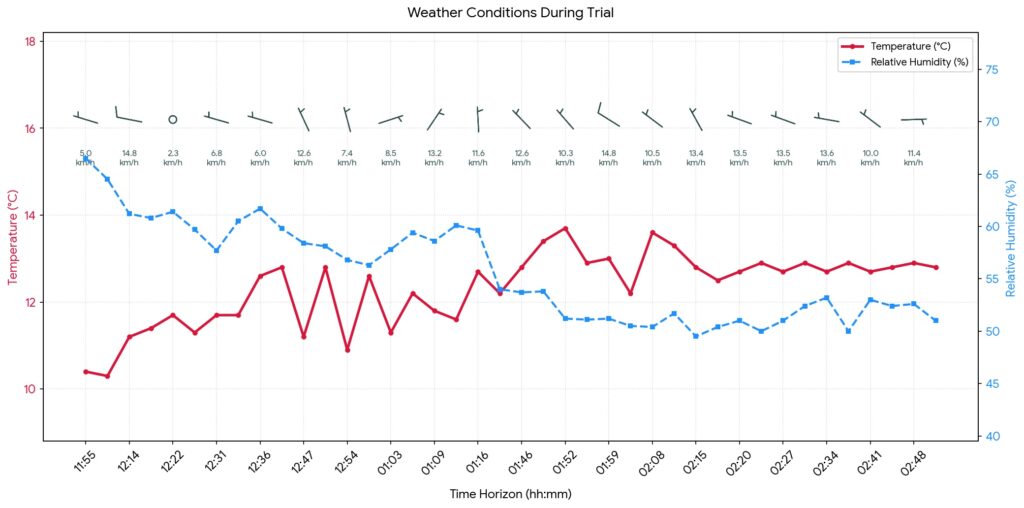
Weather data was collected using a Kestrel 3550AG weather meter (Kestrel Instruments) in a vane mount positioned 2.5 m above ground. Temperature and relative humidity were comparable throughout the ~3 hours of data collection, but as anticipated, wind speed was higher for the later Orchard configuration passes.
As previously indicated, wind direction shifted from an ideal headwind situation just before trials began, and was somewhat changeable, but the average wind direction for the two configurations was comparable (Figure 4 and Table 2).
| Time | Configuration Flown | Average Temperature (°C) | Average Relative Humidity (%) | Average Wind Speed (km/h ± SD) | Average Direction (° ± SD) |
| 11:55 am – 1:16 pm | Hybrid | 11.7 | 59.9 | 8.4 ± 3.5 | 323 ± 46 |
| 1:43 pm – 2:52 pm | Orchard | 12.9 | 51.6 | 11.9 ± 2.5 | 316 ± 48 |
Collector analysis
Bond paper digitization
Bond papers were scanned using a Swath Gobbler™ (Application Insight LLC). The software measured deposition as both percent area covered (% area) and deposit density (deposits/cm2) every 100 mm, with a thresholded Hue of 23-280, a Saturation of 5-120 and a Value of 156-255.
Effective swath width calculation
The large data set produced by each pass was reduced in size by avenging the deposition for every 50 cm. This data was entered into our Excel-based swath width calculator, which assumes a racetrack pattern and sums deposits from adjacent swaths. The resulting swath width for each pass was the maximum width that minimized over- and under-dosing as well as the coefficient of variation (CV).
Analysis
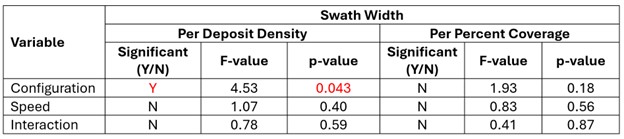
The average swath width derived from deposit density data was wider than that derived from percent area covered (Table 3).

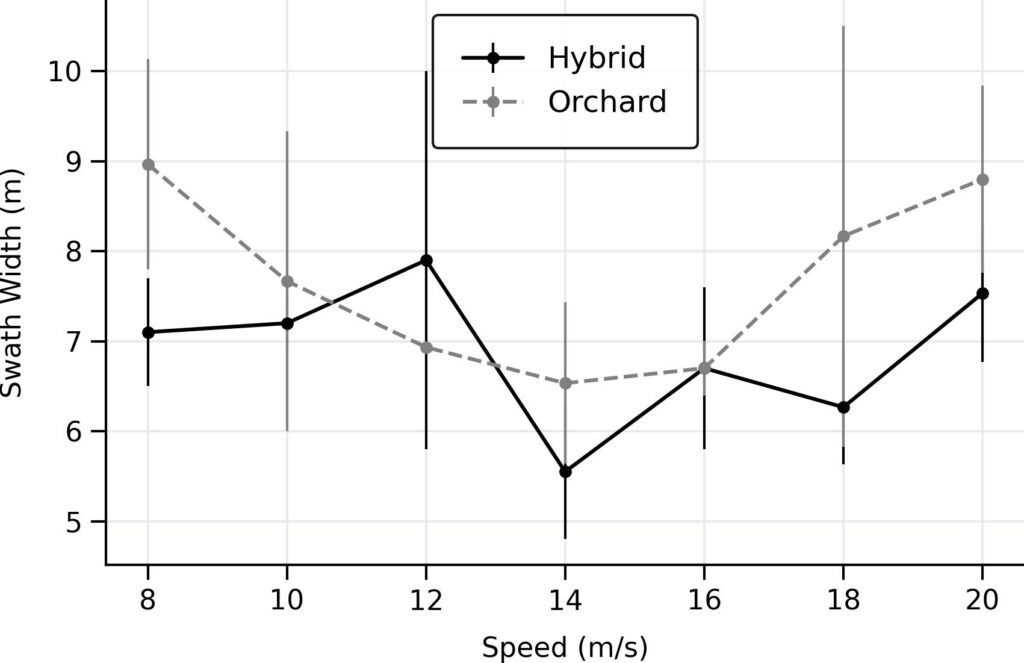
A two-way ANOVA (Analysis of Variance; α = 0.05) was performed to determine any significant effect of speed or configuration on swath width (Table 4). Flight speed had no significant effect on swath width, no matter how it was derived (% area covered or deposit density), for either configuration (Hybrid or Orchard). However, the average swath width derived from deposit density was significantly wider for the Orchard configuration compared to the Hybrid and presented higher variability.
Orchard configuration was prone to displacement in a side wind. Shifting the flight path 5 m upwind improved the downwind capture, but for some flights it did trim a small portion of the upwind deposition. Deposit density gives greater resolution and exposes more variability than percent area covered. Figure 5 shows the average deposition by speed based on deposit density. Figure 6 shows the average deposition by speed based on percent area covered.
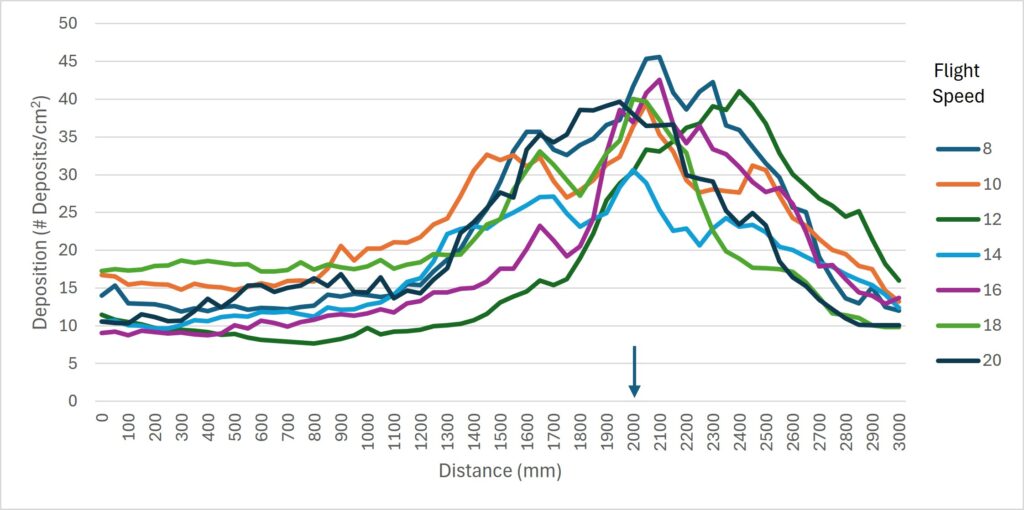
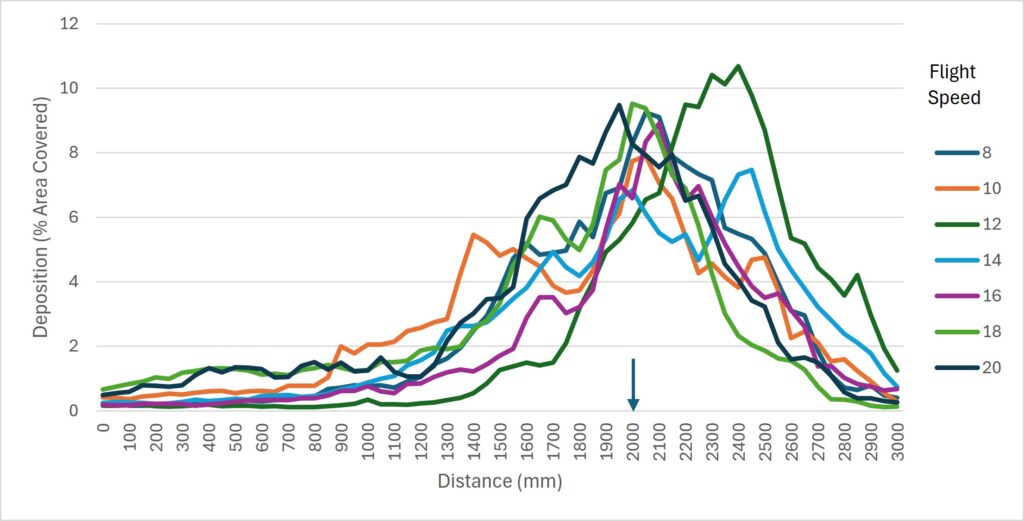
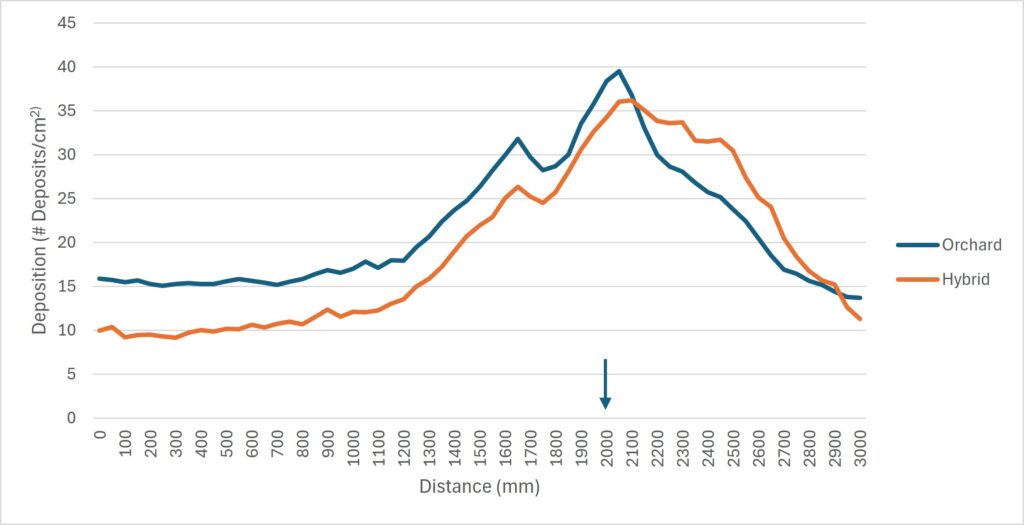
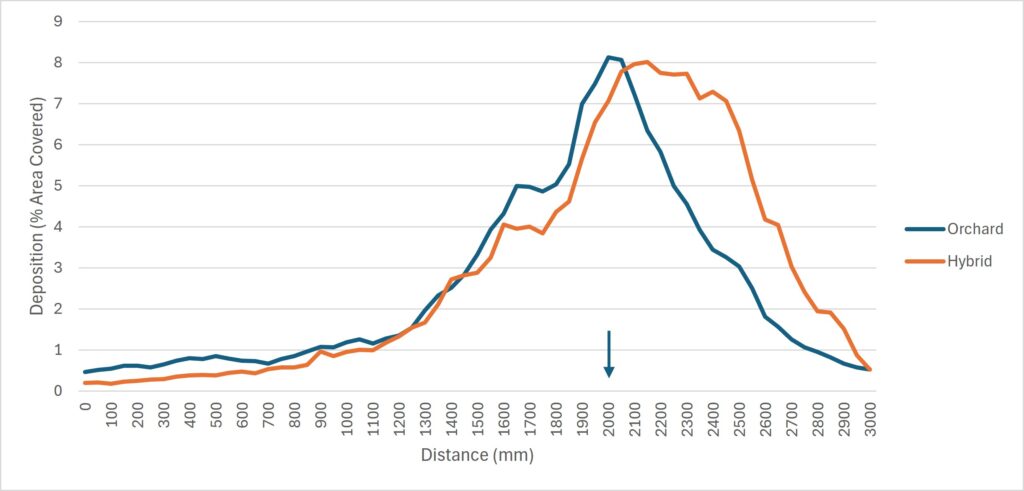
Figure 7 shows the average deposition by configuration based on deposit density. Figure 8 shows the average deposition by configuration, based on percent area covered. Based on deposit density, there were 55% more deposits on the downwind side of the sampler for Orchard configuration set to set to 500 microns compared to the Modified configuration set to 350 microns.
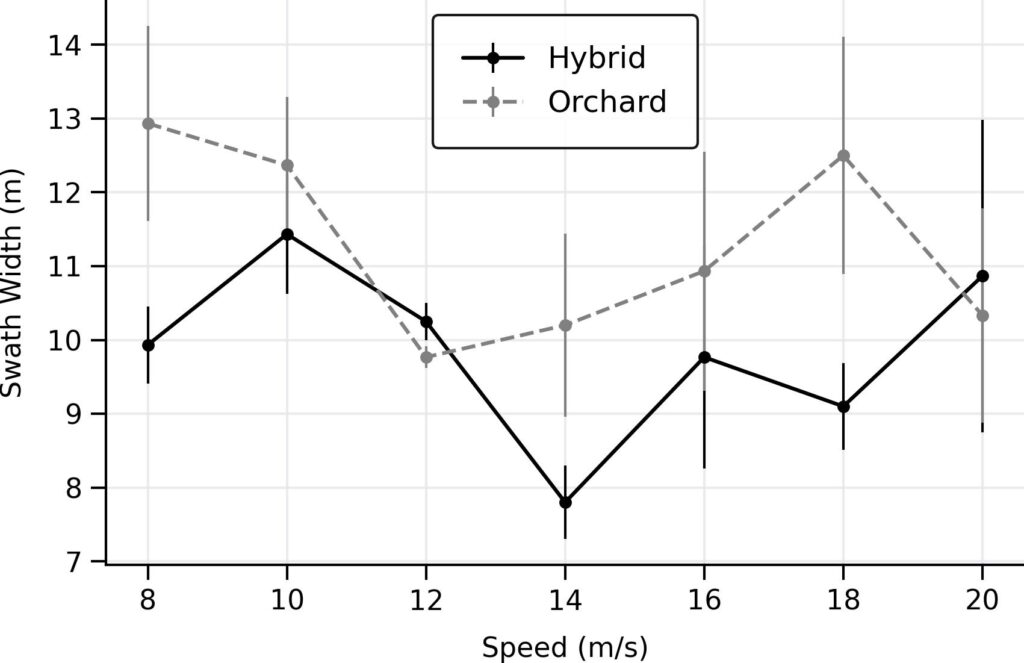
The average swath widths calculated from percent area covered (Figure 9) and deposit density (Figure 10) are shown with standard deviation. While there appears the swath width is less around 14 m/s, it is statistically insignificant and the response to speed is essentially flat.
Observations
When considered alongside previous studies which demonstrated a direct and positive relationship between drone speed and swath width, we see no further response after ~8 m/s. This supports the hypothesis that rotary-wind drone speed and swath width share an asymptotic relationship that inflects at ~8 m/s.
Despite increasing the programmed droplet size to the maximum 500 microns for the Orchard condition, there was 55% more downwind deposition compared to the Hybrid condition, which was set to 350 microns. This supports the claim that the Mister nozzle produces a finer droplet than the Sprinkler nozzle, and underpins the need for standardization for rotary atomizers.
Spraying at high speeds is not an advisable practice. While swath width (and possibly drift) are no longer affected after ~8 m/s, this does not mean it represents an efficacious or uniform application. Note that it required 200 m for the drone to reach the highest speed, and in a related study we have seen swath width taper during initial acceleration and final deceleration.
Further, the minimum 5 m altitude advised by DJI ensures a safe margin for the drone to respond to obstacles and topography during high speed flight, but is not conducive to spraying. The author is aware of a situation where flying the T100 at 4 m altitude and 18 m/s over a canola field with rolling hills caused it to perform an emergency landing.
Thanks to Drone Spray Canada and Bayer Canada for in kind and financial support, and thanks for Cesar Cappa, OMAFA horticulture weed specialist for his participation in the study.