This article summarizes a 2022 paper that can be downloaded here.
Grasshoppers are an integral part of rangeland ecosystems, but population outbreaks can cause significant damage to adjacent crops and forage. For example, cattle consume about 1.5-2.5% of their body weight in forage per day, so pound for pound, a grasshopper will eat 12-20 times as much plant material as a steer. This represents serious economic damage to the cattle industry, especially during times of drought when forage is already scarce.
Insecticides are the primary means for suppressing grasshopper populations, and they are typically applied on rangelands using conventional fixed-wing aircraft, per the United States Department of Agriculture (USDA) Animal and Plant Health Inspection Service (APHIS) Rangeland Grasshopper and Mormon Cricket Suppression Program. This is particularly effective when population hotspots can be targeted before those populations grow to critical numbers, but depending on the location, this short turn-around time can be challenging.
Recently, the use of remote piloted aerial systems (RPAS or drones) for spraying in small farm operations and for site-specific management of crop pests in terrains not easily accessible to fixed-wing aircraft has received increased attention around the globe. Drones have the potential to occupy this niche because they can fly (or even hover) closer to plant canopies with more precision and safety than conventional aerial systems.
Given these strengths, and given that swath uniformity is less of a critical issue when pests (such as grasshoppers) are particularly mobile, we investigated the efficacy of treating grasshopper population hotspots using a drone.
Plots
A randomized plot design with two treatments (untreated and control) and eight plots was established on rangeland near Estancia, New Mexico, with each rectangular plot measuring approximately 4 ha (10 ac).
The RPAS was a six-rotor Precision Vision 35 (Leading Edge Aerial Technologies, New Smyrna Beach, FL, USA) equipped with four Turbo TeeJet XR110-01 nozzles (two on each side of the aircraft) mounted to spray booms.
Swathing
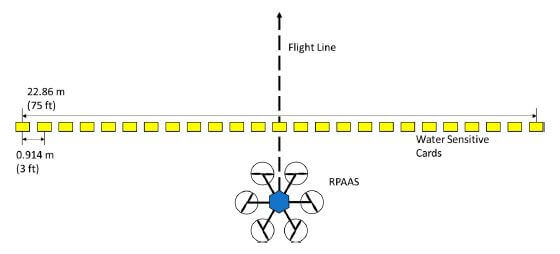
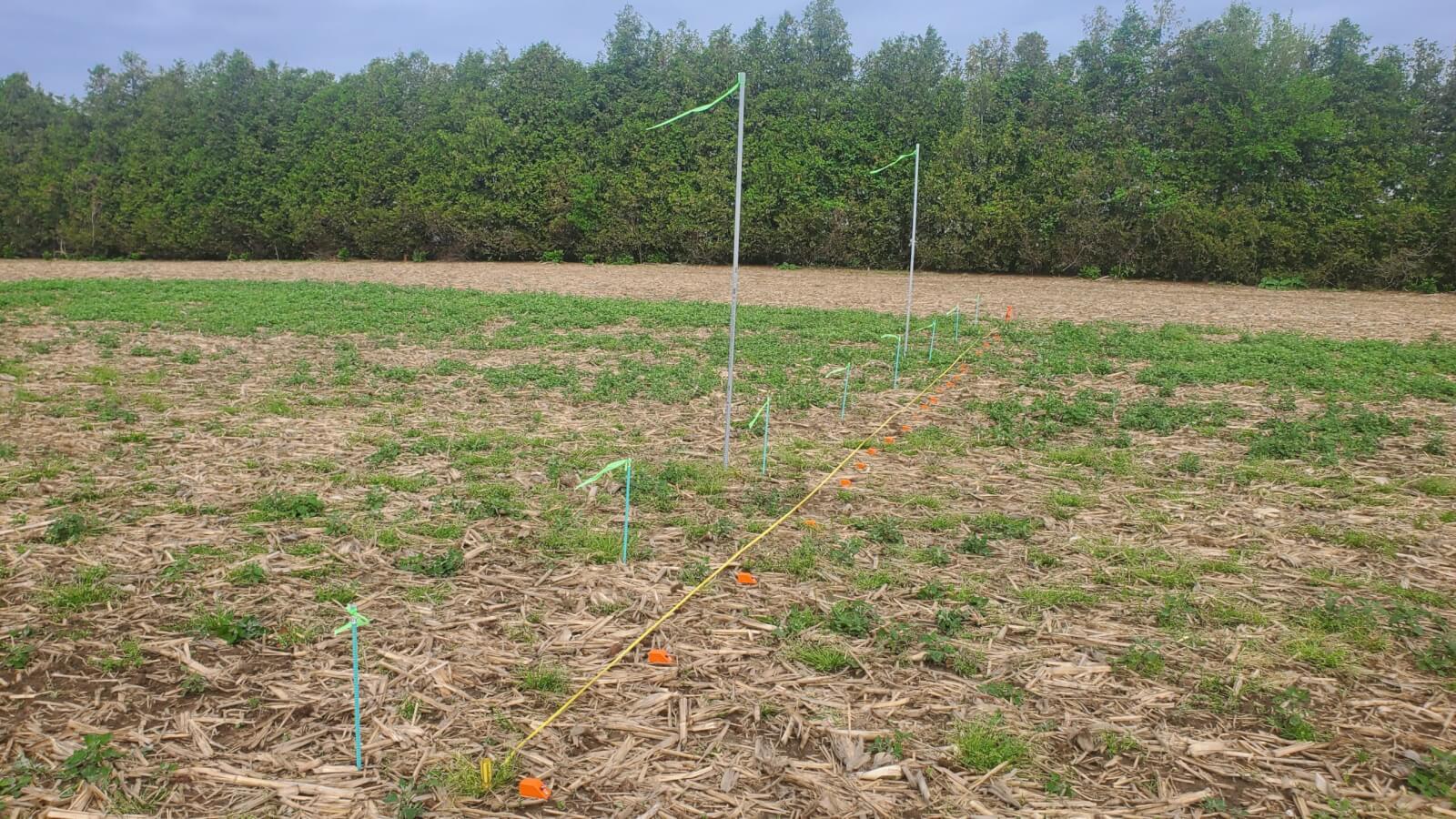
Twenty-six water sensitive papers were placed in a line perpendicular to the flight path, approximately 0.91 m (3 ft) apart, to capture the spray deposition. The RPAAS was flown at a speed of 8.94 m/s (20 mph).
Layout of water sensitive cards and flight line during spray deposition measurements.
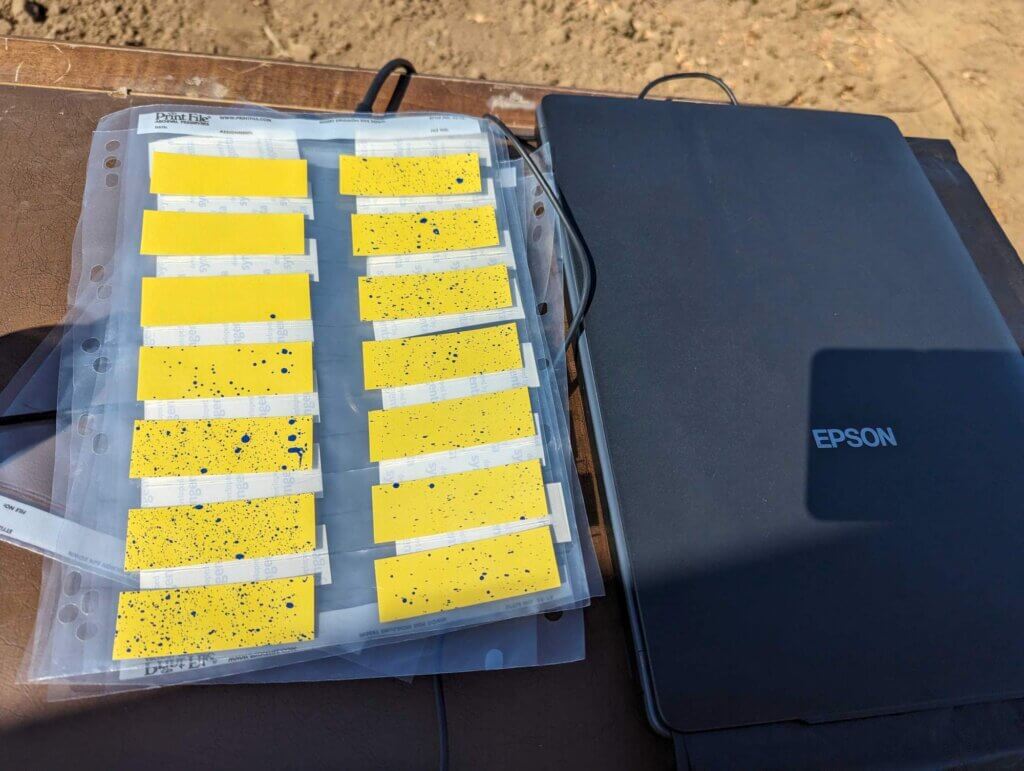
The papers were scanned with an Epson Perfection 1240U laser bed scanner and swath analysis was performed using DropletScan (WRK of Arkansas, Lonoke, AR, USA; WRK of Oklahoma, Stillwater, OK, USA; and Devore Systems, Inc. Manhattan, KS, USA). Papers were scanned at 600 dpi and the software was used to determine the coefficient of variation (CV) for both a simulated racetrack and a back-and-forth spray pattern.
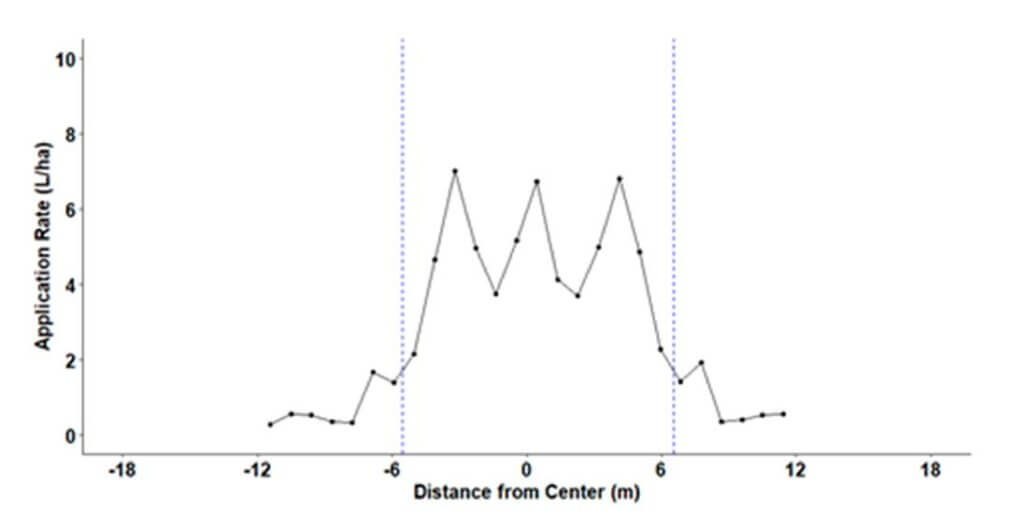
The CV for multiple effective swaths was calculated and the swath width with the lowest CV was chosen for the study. This effective swath width was 12.2 m (40 ft) with an average application rate of 2.75 L/ha (37.6 fl. oz./acre). Following a 50% RAAT IPM strategy, a 24.4 m (80 ft) swath was used for treatments, with an average treated swath application rate of 1.4 L/ha (18.8 fl. oz./acre).
Application rate of tank mixture S across swath. Dashed blue lines indicate effective swath width.
Treatment and Efficacy
Two types of grasshopper population density estimation methods (visual estimation and sweep netting) were performed on the day before treatment (pre-count) and 3, 7, 10, and 14 days after treatment.
The RPAS was flown at 9.8 m/s (22 mph) at an altitude of 3.05 m (10 ft). Treatments with the liquid insecticide Sevin XLR PLUS required a single flight to cover each replicated plot, without completely depleting the battery, and each of the four treatments was completed within approximately five minutes of the total flight time.
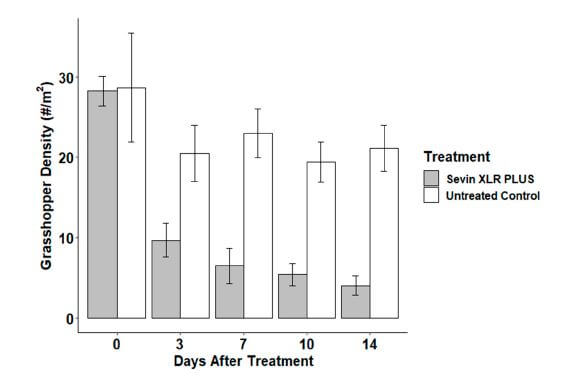
Our results demonstrated that Sevin XLR PLUS significantly suppressed grasshopper populations over a 14-day period (normalized population reduction was 79.1 ± 8.4% SEM) and quite rapidly (mostly by day 3) compared to untreated controls. These results are comparable to those achieved with fixed-wing aircraft.
Effects of Sevin XLR PLUS treatment on grasshopper density and mean ± SEM across the trial period.
Observations
Because RPAS are relatively portable, the potential exists to shorten the average length of time between the identification of a hotspot and a treatment. The RPAS covered the whole test area in a single flight in approximately 5 minutes, making these population hotspot treatment applications relatively rapid, potentially more cost-effective, and more targeted in comparison to fixed-wing aircraft.
We would describe the observed efficacy as successful in the sense that grasshopper populations, when accounting for reduction in untreated control plots, were reduced by 79.1 ± 8.35% SEM. This is very close to what is typically expected for APHIS program treatments, which is 80 to 95% population reduction. Our lower-end results can probably be attributed to the arid conditions, lower levels of rangeland forage observed during the study in that region of New Mexico, and a mobile, rapidly aging population.
Before adoption as an application method option, further research is recommended on using an RPAS to cover larger areas in combination with using diflubenzuron-based insecticides, which are often preferred.
This research was funded by an interagency agreement with USDA-APHIS-Plant Protection and Quarantine (PPQ): 20-8130-0893. It may not necessarily express APHIS’s views.
This work was performed with Mark Ledebuhr (Application Insight LLC.), Adrian Rivard (Drone Spray Canada) and Adam Pfeffer (Bayer Crop Science – funding partner). Amy Shi is gratefully acknowledged for her assistance with statistical analysis.
Introduction
In June 2017, Transport Canada cleared the general use of drones. In 2018, Health Canada clarified that the use of Remote Piloted Aircraft Systems (RPAS) for pesticide application is not permitted under the Pest Control Products Act without sufficient data to characterize any associated risk. Currently, there are no liquid pest control products registered for application by drone in Canada.
Stakeholders want to use drones to apply pest control products in Canada. To that end, several research trials have been approved by Health Canada. However, multi-rotor drones represent a unique application technology more akin to air-assisted ground sprayers than manned aircraft. As such, conventional models for drift, exposure and efficacy may not apply. Fundamental questions surrounding the utility of drones must be addressed before efficacy and residue can be considered in any relevant context.
Research and user experience has identified, and is beginning to understand the relative influence of, external factors such as crop morphology, planting architecture, topography, and environmental conditions. Considered with the product mode of action, these factors inform operational settings such as altitude, travel speed, nozzle choice, and application volume to optimize applications. This collective “Use Case” depends on drone design, which is highly variable and rapidly evolving.
Having performed preliminary work characterizing effective swath width, and recognizing its popularity in North America, we used DJI’s Agras T10 in this study. Our objective was to evaluate fungicide efficacy on Northern Corn Leaf Blight, Tar Spot, Grey Spot and Common Rust in field corn, as applied using the T10. Drift and coverage would be characterized to provide context for the efficacy analysis, but also to develop data to inform best practices and possibly regulatory decisions surrounding risk. Aspects of the study would be repeated using conventional ground sprayer technologies to form a basis for comparison.
Objectives
Quantify spray coverage in field corn at three canopy depths, on adaxial and abaxial surfaces, as recovered tracer dye (indexed to % of applied rate ac-1), area covered (%) and deposit density (deposits cm-2).
Quantify drift as recovered tracer dye (indexed to % applied rate ac-1) collected using the horizontal flux method up to eight meters high on the immediate downwind edge of the application.
Evaluate the fungicide efficacy, applied using the T10, at 2 and 5 gpa as compared to a conventional overhead broadcast treatment at 16.7 gpa.
Material and Methods
Design
Trials were conducted between July and August of 2022 in three Ontario corn fields. The locations, the application methods and data collected are detailed in Table 1.
Field
Location
Corn Variety
Application Method
Rate (gpa)
Data Collected
1
Jaffa (42°45’56.6″N 81°02’06.5″W)
DKC45-65RIB
Agras T10
2 and 5
Drift, Coverage, Efficacy
Overhead Broadcast
16.7
Coverage, Efficacy
2
Fingal (42°42’17.9″N 81°15’15.3″W)
DKC49-09RIB
Agras T10
2 and 5
Drift, Coverage, Efficacy
Overhead Broadcast
16.7
Efficacy
3
Port Rowan (42°35’53.6″N 80°30’43.2″W)
P0720AM
Directed (Drop hoses)
20
Coverage
Table 1 – Trial sites by application method and data collected
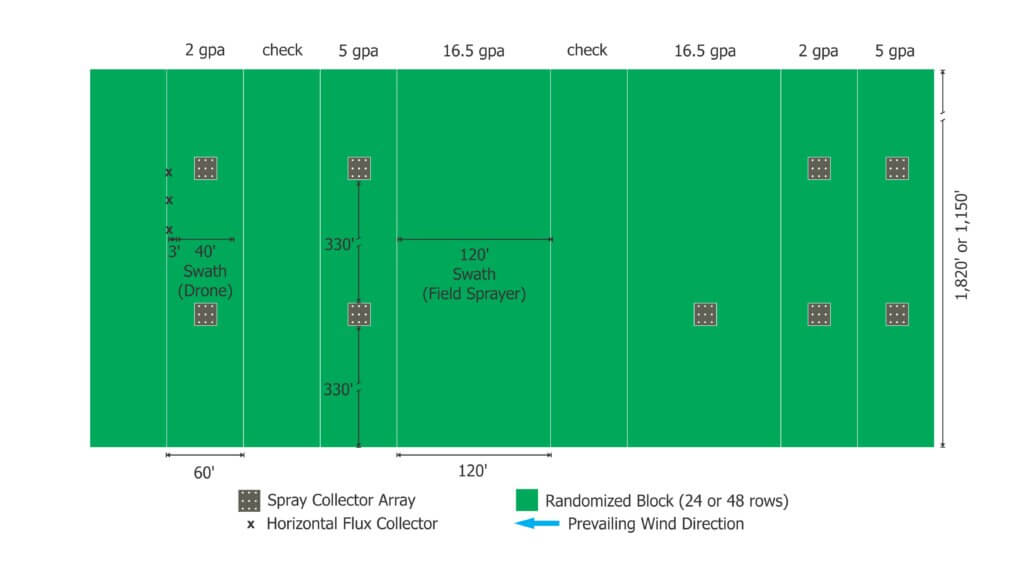
Treatments were arranged in a randomized complete block design (Figure 1). Corn was planted on 30″ centres, with about 6” in-row spacing between stalks. We targeted spray for the R1 stage of development (approx. 8’ high). Fields 1 and 2 each hosted two replicated treatments of 2 gpa, 5 gpa, and 16.7 gpa, as well as two unsprayed checks. In field 1, blocks were 60’ (24 rows) wide by 1,150’ long for the T10, and 120’ (48 rows wide) by 1,150’ long for the broadcast field sprayers. A single, 120’ swath was applied using the field sprayers, and four 10’ (4 row) swaths were required to spray the centre 40’ (16 rows) of corn using the T10. This was based on a 10’ effective swath width determined in previous research. Field 2 had a similar layout but was 1,820’ long.
Figure 1- Sample experimental layout for Field 2. In this example, horizontal flux collectors are positioned 3’ downwind to intercept any off-target drift from the edge of the adjacent 2 gpa treated area.
Coverage Analysis
To account for variability, each treatment block was subdivided into two regions, each containing an array of nine spray collectors. Each spray collector (Figure 2) consisted of a vertical, 8’ pole in-row between corn plants. Samplers were attached at three depths to span the silking region: Top: 1.5’-2’ below the tassel. Bottom: 1.5’-2’ from the ground. Middle: halfway between them. Samplers were parallel with the ground to ensure the highest degree of spray interception. On one side, two 1”x3” water sensitive papers (WSP; Innoquest Inc.) were clipped back-to-back with a sensitive side positioned up (adaxial) and facing down (abaxial). The other clip held two 4” square sheets of Mylar in the same orientation. Sampler type was alternated vertically (e.g. Mylar – WSP – Mylar or WSP – Mylar – WSP).
Figure 2- Spray collectors temporarily loaded with WSP and Mylar samplers. These were held above the tassels as they were carried to the collection sites in each block. Three clips were positioned per pole, alternating Mylar and WSP samplers on each side, on two arrays of nine poles, as previously described.
This study used 864 WSP and 864 Mylar samplers for the RPAS treatments, and 162 WSP for the overhead broadcast and directed applications. Following the application, samplers were retrieved as soon as they were dry enough to handle (about 30 minutes) and individually placed into pre-labeled sealable plastic bags, each uniquely coded to the exact position and orientation of the collector.
Operational Use Cases
5 gpa: DJI Agras T10 was operated at 3.3 m/s, 2 m above tassels. TeeJet 11002 AIXR nozzles equipped with 50 mesh filters were operated at 70 psi.
2 gpa: DJI Agras T10 was operated at 7.0 m/s, 2 m above tassels. TeeJet 11002 AIXR nozzles equipped with 50 mesh filters were operated at 45 psi.
16.7 gpa: Overhead broadcast condition. Field 1 ran a John Deere 4038R operated at approx. 10 mph with TeeJet XR11006 nozzles on 20” spacing. Pulse width modulation (ExactApply) was engaged. Field 2 ran a New Holland 345 front-mounted boom sprayer with TeeJet XR11006 nozzles on 20” spacing.
20 gpa: Directed condition. John Deere R4038 operated at approx. 4.5 mph with Beluga drop hoses suspended on 30” centres to correspond with alley spacing. Two nozzle bodies were positioned 15″ apart equipped with Greenleaf Spray Max 110015 nozzles to span the silking area.
Drift Analysis
Three free-standing 26’ (8 m) horizontal flux collectors were positioned in the corn field approximately 3’, or 1.5 rows from the downwind edge of the spray plot downwind of the area treated by drone (Figure 3). The sampling poles were positioned about 30’ apart parallel to the treatment block. Sterilized, 1.8 mm braided polyethylene collector line was run up the poles on pulleys just prior to application. Following applications, the line was collected in 1 m lengths into sealed bags.
The assumption was that by placing the horizontal flux samplers as close to the “zero” downwind edge position as possible, nearly the entire off-swath movement of drift would be captured. A compromise of placing the samplers in the middle of the first row past the downwind swath edge was made due to the scale of the sample and the relative low swath precision of the drone. Placing the samplers closer to the zero downwind line was deemed to be too high a risk of inadvertently sampling in-swath.
Figure 3- Moving horizontal flux poles into the field prior to positioning them for trials. String collectors were run up the poles just before spray application and retrieved immediately afterwards.
Spray Solution (Formulated Product plus Tracer)
Fungicide was applied at field rates (8 oz/ac or 586 mL/ha). The field sprayer applied this at 16.7 gpa. The drone applied it at 2 or 5 gpa but also included tracer solution at 0.2% (20 ml/10L solution) vol./vol. of a 20% mass/mass solution of PTSA in dH2O. PTSA residue data assumes 100% recovery and 0% degradation of the tracer. Tests of PTSA with fungicide prior to the study showed no physical antagonism and >98% tracer recovery. Prior testing of PTSA showed an acceptable 1-2% solar degradation in the timeframe required to collect samplers. Tank samples were drawn from the drone at the beginning and end of each trial and used to confirm tank concentration and to establish fluorescence curves.
Weather Conditions
Weather data was collected using a Kestrel 3550AG weather meter (Kestrel Instruments) in a vane mount positioned 1 m above the tassel (approximately 1 m below drone altitude). Data was logged every 5 seconds. Issues with data loss required us to supplement local data with Field Level Weather Summary data (Table 2).
Date (2022)
Field
Vol. (gpa)
Avg. Temp. (°C)
Avg. Windspeed (km/h)
Start Time
Duration (min.)
Jul 25
1
5*
22.3
6.2
13:00
35
Jul 25
1
5
21.4
7.5
18:45
35
Jul 26
1
16.7
18.8
5.4
10:00
45
Jul 26
1
2
23.9
7.7
15:30
25
Jul 29
2
5**
n/a
16.4
11:00
35
Jul 29
2
2***
23.6
21.0
14:00
25
Aug 12
3
20****
25.4
6.3
13:30
15
Table 2- Date, location, and weather conditions for each treatment *Trial pass over spray collectors only – no horizontal flux collectors employed. **All bottom-level water sensitive paper samplers spoiled by high humidity. Wind changeable and horizontal flux poles moved 2x before application to orient downwind. ***Noted flocculation in tank samples likely from rainfastness adjuvant. Did not affect analysis. ****Coverage data from a single array of nine spray collectors with water sensitive paper samplers.
Results
Statistics
The % applied rate ac-1, % area covered, and deposits cm-2 were subjected to analysis of variance using SAS® OnDemand for Academics PROC GLM. When a significant treatment effect was found, means were compared using Tukey’s honest significant difference test (HSD) at p=0.05.
Data Collation
Each spray collector was a vertical structure that supported Mylar samplers at three depths. Each depth held two samplers oriented abaxially or adaxially, in parallel with the ground. When discussing the amount of PTSA recovered by sampler depth or by sampler orientation, the % applied rate ac-1 of each of the nine related samplers were averaged within each array (n=2 arrays per block times two replicates equal n=4 per treatment).
When considered from above, the six Mylar samplers are vertical cross-sections of the same area of ground. Therefore, the % applied rate ac-1from each sampler was added to represent the total mass of tracer intercepted per collector. When these nine sub-samples are averaged, we arrive at the average % applied rate ac-1 per array.
Similarly, the % applied rate ac-1 from each 1 m length of string on a horizontal flux collector could be averaged across collectors by relative position to explore drift by height (n=3 poles per block times two replicates equal n=6 per treatment). Alternately, the total PTSA recovered per pole could be calculated (n=3 poles per block times two replicates equal n=6 per treatment). This interpretation allowed us to perform a mass balance accounting of residue in-canopy and as drift compared to the known applied rate ac-1.
It was not possible to collate the data in this fashion for the WSP because it was not possible to index % area or deposits cm-2 on a 1”x3” area to a theoretical maximum. Therefore, we averaged the nine samplers within an array relative to their position and orientation (n=2 arrays per block times two replicates equal n=4 per treatment) or averaged the six samplers per collector prior to averaging all collectors in an array (n=2 arrays per block times two replicates equal n=4 per treatment).
RPAS Coverage – Mylar Samplers
There is a negative linear relationship (r2=0.997) between the depth of the sampler and the average % applied rate ac-1 (Table 3). The deeper the sampler, the less tracer recovered. The sum of the average % applied rate ac-1 at each depth was 17.7% of known rate applied rate ac-1.
Sampler Depth
Avg. % Applied Rate ac-1
Significance
Top
9.6
A
Middle
5.7
B
Bottom
2.4
C
Total:
17.7
–
Table 3- The depth of the sampler had a significant effect on the overall average amount of PTSA recovered.
The orientation of the sampler significantly affected the overall average amount of tracer recovered (Table 4). The abaxial surfaces intercepted an average 11.1 % applied rate ac-1 less (a 97% difference) than adaxial surfaces. Note: When Mylar was retrieved a few had physically shifted, potentially exposing the back side of abaxial collectors to primary deposition from above. Therefore, it is assumed that the actual deposit is lower than reported here.
Sampler Orientation
Avg. % Applied Rate ac-1
Significance
Adaxial
11.4
A
Abaxial
0.3
B
Table 4- The orientation of the sampler had a significant effect on the overall average amount of PTSA recovered.
When we separate the data to focus on the volume applied, we see volume had a significant impact on the amount of tracer recovered (Table 5). The average % applied rate ac-1 was 2.1% less (a 58% difference) in the 2 gpa condition compared to the 5 gpa condition.
Field
Avg. % Applied Rate ac-1
Significance
1
7.1
A
2
4.6
B
Table 5- The field location had a significant impact on the average amount of PTSA recovered.
When we isolate the volume applied by field, the 2 gpa treatment resulted in less coverage in field 2 (average 1.4 % applied rate ac-1 or 28% less) and significantly for the 5 gpa treatment (average 3.6 % applied rate ac-1 or 41% less: Table 6).
Date
Field
Volume (gpa)
Avg. % Applied Rate ac-1
Significance
Jul 25
1
5
9.2
A
Jul 26
1
2
5.0
B
Jul 29
2
5
5.6
C
Jul 29
2
2
3.6
B
Table 6- The average amount of PTSA recovered by date and location show lower overall recovery in Field 2.
When sampler depth is included in the field analysis (Table 7), we see similar deposition patterns; a negative linear relationship between coverage and canopy depth in all treatments save the 5 gpa treatment in field 2. Closer inspection confirms a reduction in coverage for the 2 gpa condition in field 2 versus field 1, and a significant reduction for the 5 gpa condition in field 2 versus field 1.
Table 7- The average residue recovered by date, location and sampler depth is significantly less in the 5 gpa condition in field 2 and does not distribute linearly by sampler depth.
RPAS Drift – Horizontal Flux
Overall, the volume applied had a significant impact on drift, where the 2 gpa treatment resulted in an average increase of 1.6 % applied rate ac-1 (44% difference: Table 8) versus the 5 gpa treatment.
Volume Applied (gpa)
Avg. % Applied Rate ac-1
Significance
2
3.6
A
5
2.0
B
Table 8- The volume applied had a significant impact on the amount of the PTSA recovered.
As with the Mylar samplers, there was a “field effect” where the field had a statistically significant impact on the amount of tracer recovered (Table 9). However, unlike the Mylar samplers in the crop, more tracer was recovered in field 2 (average increase of 3.2 applied rate ac-1 or a 67% difference) than in field 1.
Field
Avg. % Applied Rate ac-1
Significance
1
1.4
A
2
4.2
B
Table 9- The field location had a significant impact on the amount of PTSA recovered.
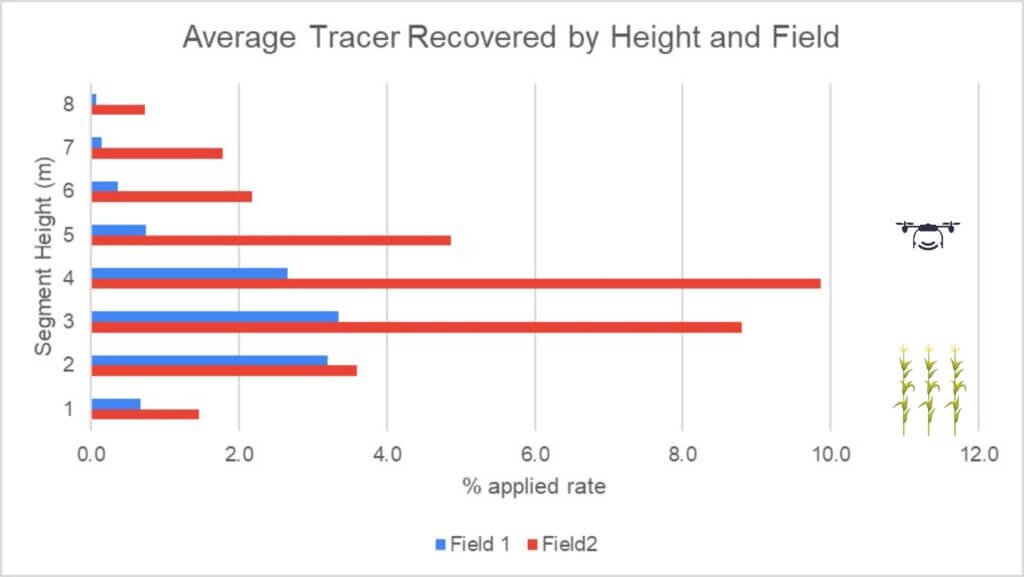
The pattern of deposition by height was similar across all treatments. For context, note that the first 2.5-3 m of string were within the corn canopy and drone altitude was approximately 5 m off the ground (2 m over the tassels) per Figure 4 and 5. The differences were only statistically significant in field 2 (Table 10) where an average 33% applied rate ac-1 was intercepted compared to 11% in field 1.
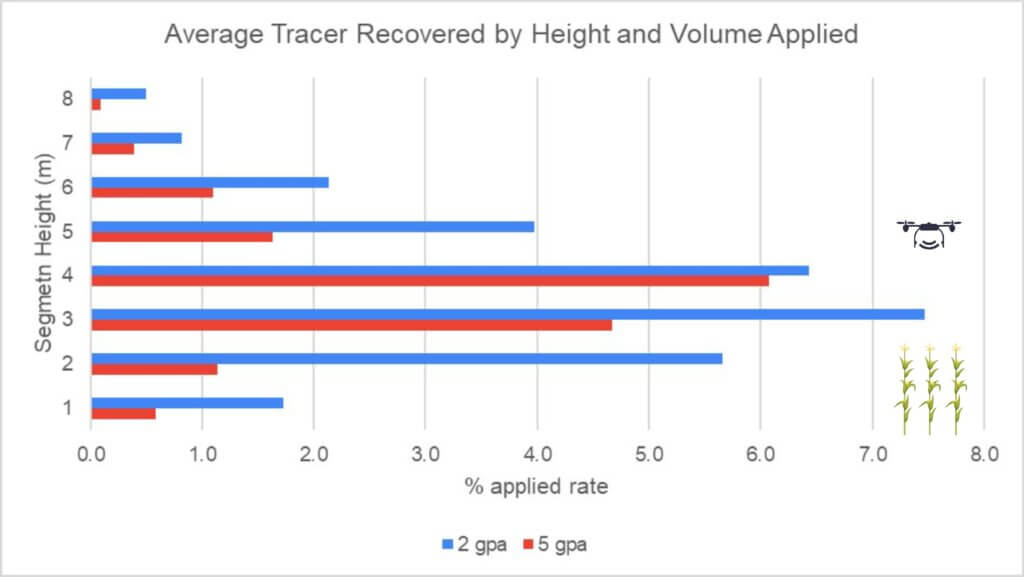
Figure 4- Average PTSA recovered (% applied rate ac-1) by height and field.Figure 5- Average PTSA recovered (% applied rate ac-1) by height and volume applied.
Height (1m segment in m from ground)
Field 1: Avg. % Applied Rate ac-1
Sig.
Field 2: Avg. % Applied Rate ac-1
Sig.
8
0.7
A
1.5
C
7
3.2
A
3.6
BC
6
3.3
A
8.8
A
5
2.7
A
9.9
A
4
0.7
A
4.9
AB
3
0.4
A
2.2
BC
2
0.1
A
1.8
C
1
0.1
A
0.7
C
Total:
11.2
–
33.3
–
Table 10- The average amount of PTSA recovered by height for field 1 and field 2.
The volume applied had a significant effect on the total PTSA tracer detected in both fields, with an average 4.4% applied rate ac-1 more (a 59% difference) recovered in the 2 gpa treatment (Table 11 and Figure 5). Separated by fields, the 5 gpa treatment had an average 1.4% % applied rate ac-1 more (a 77% difference) in field 2 and the 2 gpa treatment had an average 2.8% % applied rate ac-1 more (a 76% difference) in field 2.
Volume Applied (gpa)
Field 1: Avg. % Applied Rate ac-1
Sig.
Field 2: Avg. % Applied Rate ac-1
Sig.
2
2.2
A
5.0
A
5
0.7
B
2.1
B
Table 11- The volume applied had a significant impact on the amount of PTSA recovered.
Mass Balance Accounting
It is never possible to entirely “close mass” in spray studies because there are other surfaces (e.g. leaves) within the vertical profile that intercept spray, as well as off-swath deposition and the ground itself (not measured in this study). Nevertheless, the exercise does allow us to estimate and compare how much spray was captured and how much remains unaccounted for (Table 12). We see that the 2 gpa treatment in field 1 had the highest unaccounted-for fraction, and on average we were able to account for an average 53% of the applied rate ac-1 in this study.
Field (Volume in gpa)
Coverage: Avg % Applied Rate ac-1 (A)
Drift: Avg % Applied Rate ac-1 (B)
Total % Detected (A+B)
Unaccounted Fraction [100-(A+B)]
1 (5)
51
5
56
44
1 (2)
26.5
17
43.5
56.5
2 (5)
30
24
54
46
2 (5)
19.5
40
59.5
40.5
Table 12- Closing mass using % PTSA detected on in-canopy samplers and on drift collectors.
RPAS and ground rig coverage – Water Sensitive Paper
The depth of the sampler had a significant effect on the overall average % area covered at all depths (Table 13). However, there was no significant difference at the two lower depths for deposit density (Table 14). In both cases, the negative linear relationship between coverage and sampler depth corresponds closely to the PTSA recovered on the Mylar samplers (see Table 3).
Sampler Depth
Avg. Coverage (% Area)
Significance
Top
2.80
A
Middle
1.28
B
Bottom
0.62
C
Table 13- Overall average % coverage by sampler depth.
Sampler Depth
Avg. Coverage (Deposits cm-2)
Significance
Top
44.5
A
Middle
17.9
B
Bottom
7.2
C
Table 14- Overall average deposit density by sampler depth.
The sampler orientation had a significant effect on both overall average % area covered (Table 15) and deposits cm‑2 (Table 16).
Sampler Orientation
Avg. Coverage (% Area)
Significance
Adaxial
3.03
A
Abaxial
0.12
B
Table 15- The orientation of the sampler had a significant effect on the average % area covered.
Sampler Orientation
Avg. Coverage (Deposits cm-2)
Significance
Adaxial
43.5
A
Abaxial
3.1
B
Table 16- The orientation of the sampler had a significant effect on the average deposit density.
The treatment had a significant effect on the overall % coverage (Table 17) with the overhead broadcast condition covering an average 3.31% more sampler surface (a 60% difference) compared to the next highest treatment value. The directed application delivered a significantly higher 67 deposits cm-2 (a 72% difference) compared to the next highest treatment value (Table 18).
Treatment (gpa)
Avg. Coverage (% Area)
Significance
Broadcast (16.7)
5.91
A
Directed (20)
2.32
B
Drone (5)
1.34
BC
Drone (2)
0.55
C
Table 17- Overall average % coverage by treatment.
Treatment (gpa)
Avg. Coverage (Deposits cm-2)
Significance
Broadcast (16.7)
92.6
A
Directed (20)
25.8
B
Drone (5)
22.9
B
Drone (2)
5.9
B
Table 18- Overall average deposit density by treatment.
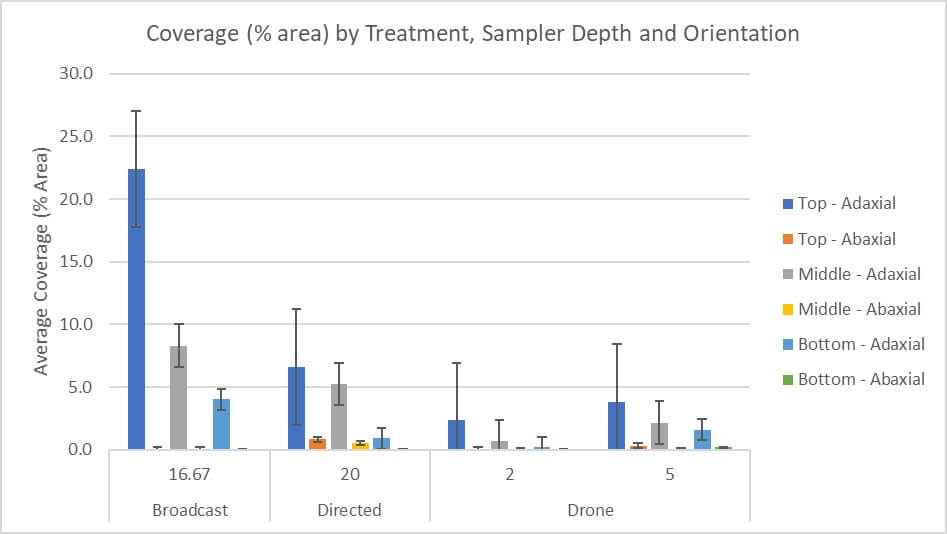
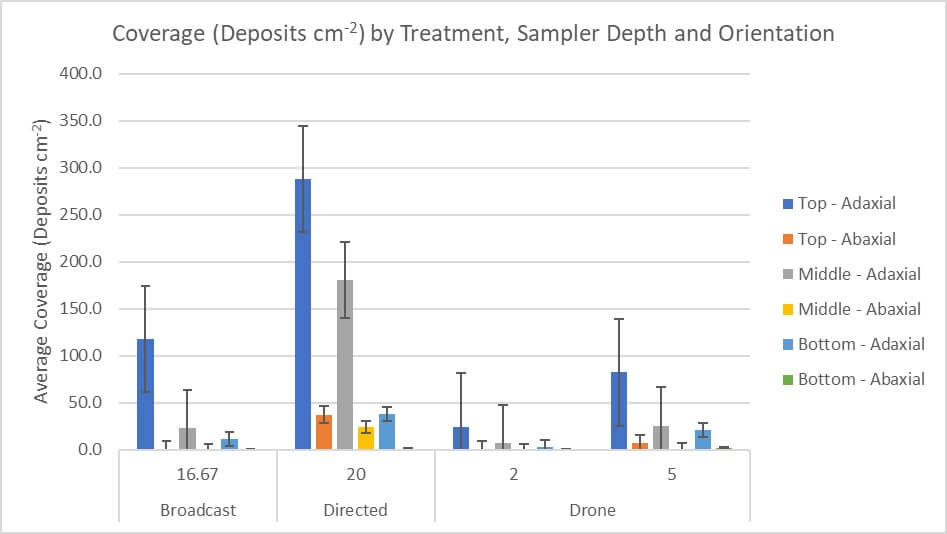
When we increase resolution to include sampler orientation, we see high standard errors typical of the variability inherent to spray coverage analysis (Figures 6 and 7). The broadcast treatment had the highest average adaxial % area coverage and the second highest average deposit density. The directed treatment had the second highest average adaxial % area coverage and the highest average deposit density but had the highest overall average coverage on the abaxial samplers. RPAS coverage on all samplers was lowest overall and was relative to the volumes applied.
Figure 6- Coverage (% area) by treatment, sampler depth and orientation.Figure 7- Coverage (Deposits cm-2) by treatment, sampler depth and orientation.
Focusing on RPAS treatments, the orientation of the sampler significantly affected coverage (Tables 19 and 20).
Sampler Orientation
Avg. Coverage (% Area)
Sig.
Avg. Coverage (Deposits cm-2)
Sig.
Adaxial
1.1
A
11.6
A
Abaxial
0.0
B
0.4
B
Table 19- RPAS (2 gpa) coverage by sampler orientation.
Sampler Orientation
Avg. Coverage (% Area)
Sig.
Avg. Coverage (Deposits cm-2)
Sig.
Adaxial
2.5
A
47.3
A
Abaxial
0.2
B
7.5
B
Table 20- RPAS (5 gpa) coverage by sampler orientation
Continuing to focus on the RPAS treatments, the depth of the sampler had a significant effect on overall average coverage at both 2 gpa (Table 21) and 5 gpa (Table 22). Just as with the average % applied rate ac-1 (included here for comparison), the overall average coverage on the top adaxial sampler was significantly higher than the other two depths for % area covered and deposits cm-2.
Sampler Depth
Avg. Coverage (% Area)
Sig.
Avg. Coverage (Deposits cm-2)
Sig.
Avg. % Applied Rate ac-1
Sig.
Top
1.2
A
12.8
A
7.5
A
Middle
0.4
B
3.9
B
3.8
B
Bottom
0.1
B
1.3
B
1.7
B
Table 21- Coverage on the top sampler was significantly different than other depths at 2 gpa.
Sampler Depth
Avg. Coverage (% Area)
Sig.
Avg. Coverage (Deposits cm-2)
Sig.
Avg. % Applied Rate ac-1
Sig.
Top
2.1
A
48.3
A
9.2
A
Middle
1.1
B
17.6
B
5.8
B
Bottom
0.9
B
16.4
B
2.3
B
Table 22- Coverage on the top sampler was significantly different than other depths at 5 gpa.
Comparing data from WSP to Mylar Samplers
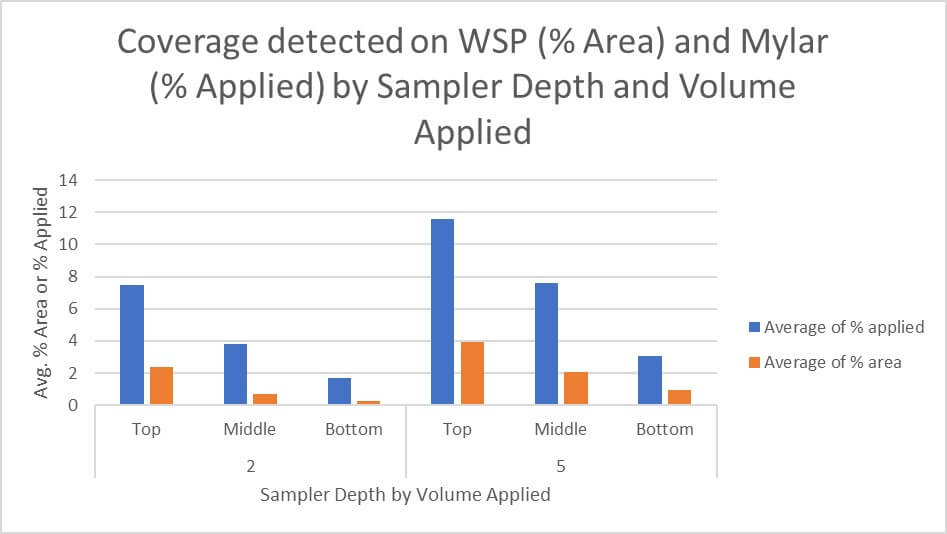
There was a correlation between the % area coverage detected using WSP and the tracer recovered from the Mylar samplers. Deposit density provides valuable information about the distribution of spray over the target surface but does not always correlate with % area covered, and it is therefore omitted from this comparison. When we plot the average % area covered from the adaxial WSP against the average % applied rate ac-1 from the Mylar samplers, we see the same near-linear pattern of decay with depth (Figure 8).
Figure 8- Average coverage from adaxial samplers plotted by depth and volume applied show similar coverage patterns.
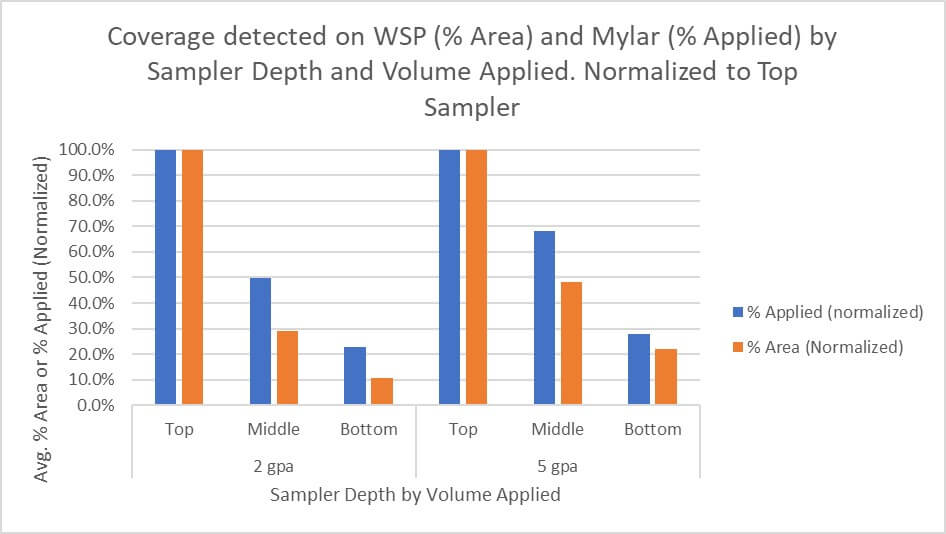
If we assume each top, adaxial sampler (irrespective of sampler material) represents the highest degree of coverage, we can assign it a value of 100% and index the data to this value. This allows us to visualize and compare the two sampler types directly (Figure 9) and illustrates similar relative coverage, but perhaps a greater rate of decay for the WSP.
Figure 9- Average coverage from adaxial samplers plotted by depth and volume applied show similar coverage patterns. Normalized to top sampler.
Net Revenue and Disease Pressure
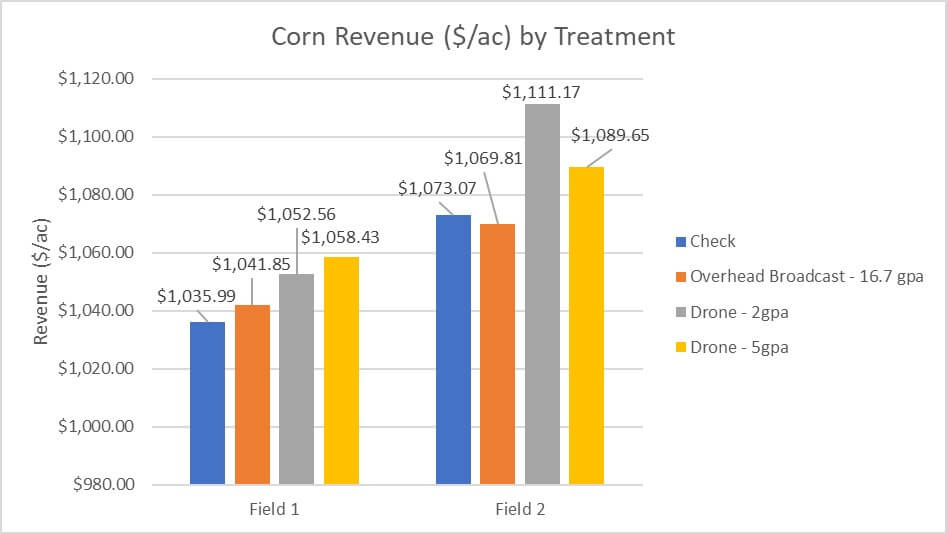
Crops were harvested at the R4 stage of development. There was no disease pressure detected in any field and no clear impact of application method on net revenue (Figure 10). Results based on the following formula: (CAD $/ac) = (Seed Yield × Corn Sale Price) – Drying Cost. No conclusions regarding efficacy can be drawn from this data.
Figure 10- Net Revenue (CAD $/ac) by field and treatment.
Key Observations
Water Sensitive Paper (WSP) measurements of percent area covered (% area) and deposit density (deposits cm-2), and Mylar samplers measuring mass deposit (% applied rate ac-1), revealed similar coverage patterns, making both samplers viable methods for RPAS coverage analysis. These are complimentary methods that reveal different aspects of coverage. When possible, they should be used simultaneously to produce a more complete analysis.
RPAS and conventional overhead broadcast applications produced similar deposition patterns in the corn canopy: A negative linear relationship between coverage and adaxial sampler depth was observed for most treatments (r2=0.997) and abaxial coverage was very low or more often, nonexistent. Further, overall coverage shared a direct relationship with volume for RPAS and conventional overhead broadcast applications.
Directed applications in this study employed a finer spray quality, released laterally from within the canopy. This produced a different coverage pattern than the RPAS and overhead broadcast applications. Per WSP, this treatment resulted in the highest overall deposit density and was the only treatment to produce significant deposition on abaxial surfaces.
For RPAS, spray coverage was significantly reduced by -58% (based on avg. applied rate ac-1), by -59% (based on avg. % covered) and by -74% (based on avg. deposits cm-2) and drift was significantly increased by +73% for the 2 gpa treatments versus the 5 gpa. We attribute this primarily to drone travel speed, which increased from 3.3 m/s at 5 gpa to 7 m/s at 2 gpa. For context, and with certain exceptions, travel speed shares a negative relationship with spray coverage and a direct relationship with drift in airblast and field sprayer applications.
There was a “field effect” where field 2 had lower overall RPAS coverage for both 2 and 5 gpa treatments. Compared to field 1, by -28% for the 2 gpa treatment, and by -41% for 5 gpa. Average drift increased by +76% for 2 gpa and by +77% for 5 gpa. We attribute this to the significantly higher wind conditions in field 2.
Given the lack of disease pressure in the two fields, and the lack of any significant difference in revenue by treatment within each field, efficacy is inconclusive. This study represented only two of eight fields in a larger RPAS efficacy trial where five locations had disease pressure high enough to rate. Preliminary results suggest that Tar Spot control from a 5 gpa drone application may be comparable to that of a 16.7 gpa overhead broadcast application from a field sprayer (data not shown).
Summary
Drone and conventional overhead broadcast treatments deposited spray in a similar pattern (a negative linear relationship with canopy depth and very low or no abaxial coverage), irrespective of the method used to analyze coverage. RPAS produced significantly lower coverage than the conventional overhead broadcast treatment, which is attributed primarily to the low volumes employed, per the direct relationship between volume applied and overall coverage (up to some point of diminishing return). High ambient windspeed significantly increased drift in both the 2 and 5 gpa conditions and reduced spray coverage. High travel speeds (required to apply 2 gpa) likely contributed to the significantly increased drift and reduced coverage in that treatment versus 5 gpa. For the use cases explored in this study, low volumes and high travel speeds are not advisable for RPAS, particularly in high wind conditions. Future work separating the travel speed and ambient wind speed variables would clarify their relative influence on RPAS drift and coverage.
This video presentation is covers the highlights of the study. And disregard the verbal slip-up: we didn’t travel 110 mph.
Editor’s Note: This work was performed in 2023. A more recent exploration into wheat head coverage was performed in 2025. This article is not obsolete as it introduces concepts and makes foundational observations. Read on, then read the 2025 article afterwards.
Fusarium head blight is one of the most economically important diseases in winter wheat. Application timing is arguably the most critical aspect of effective crop protection. The application window stretches some two to five days following the point where 75% of the wheat heads are fully emerged and coinciding with the beginning of flowering (Figure 1). Product placement is the second most critical aspect, where the wheat head represents the primary target, and the flag and penultimate leaf are somewhat incidental, secondary targets.
Figure 1. Winter wheat at T3 staging is optimal for fungicide application.
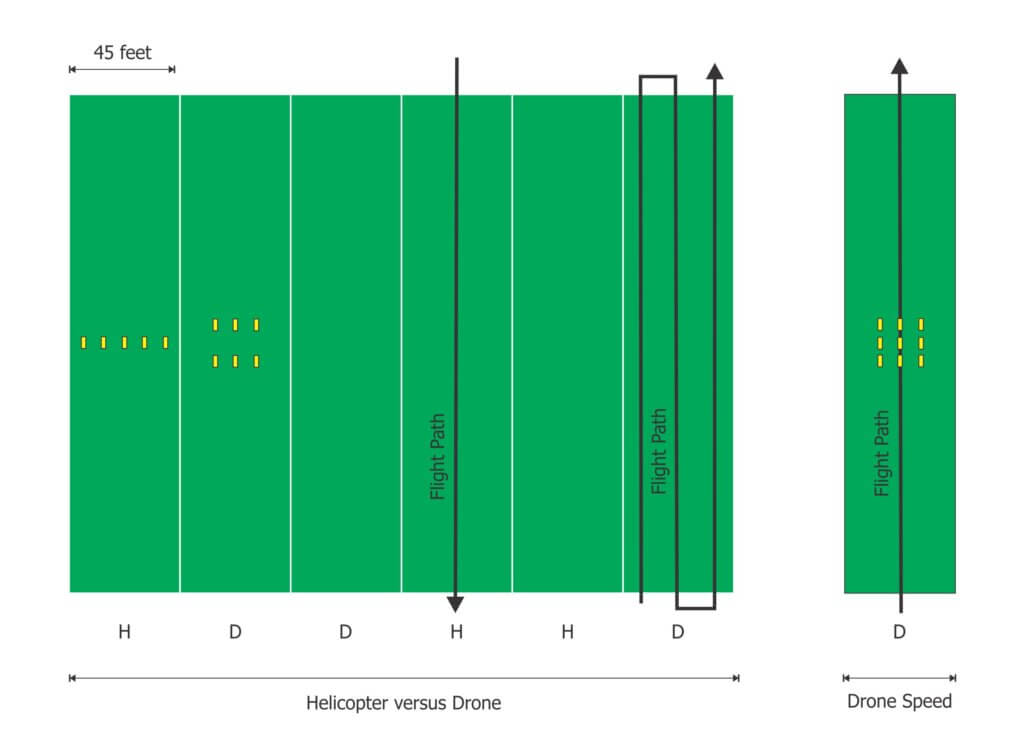
This article describes the results of two experiments exploring wheat head spray coverage from a rotary drone. The first compares wheat head coverage from a drone to that of a helicopter (Figure 2). The second explores the effect of drone ground speed, and the related downwash, on wheat head coverage. All work was performed under PMRA research authorization. As of the date of this publication, there are no crop protection products permitted for application by RPAS in Canada.
Figure 2. The helicopter spraying in background does not create a downwash. Note how the spray is not forced straight down but falls in a sheet subject to gravity and inertia. The rotary drone spraying in the foreground does create a downwash. Note how the wheat is displaced by the spray-laden air as the drone passes. At higher speeds, this downwash does adopt a down-and-back vector.
Experimental Design
Wheat field
The wheat field was clay/loam located at 42°47’12.6″N 81°03’06.4″W near New Sarum, Ontario. Wheat was “common seed” planted on October 2nd, 2022, at 1.8 million seed/ac on 19 cm (7.5 in) row spacing. It was sprayed on June 5th, 2023, and at the time the wheat heads were about 0.7 m (2.5 ft) high.
Treatments were laid out parallel with the planting direction in a randomized design. The helicopter pilot reported an effective swath width of 13.7 m (45 ft), which formed the basis for the treatment block widths (Figure 3). The helicopter made a single pass. The drone pilot reported an effective swath width of 4.5 m (14.75 ft). It made three passes per treatment block in the helicopter versus drone experiment but made only a single pass centred on the treatment block for the speed experiment.
Both the helicopter and drone applied fungicide at label rate plus 0.125% Activate in a final volume of 50 L/ha (5 gpa). For the helicopter this was about 20 ac. per jug, and for the drone we created an equivalent tank mix using 450 ml fungicide and 37.75 ml Activate diluted with water to fill the 30 L spray tank.
Figure 3. Treatment layout for both experiments. H: Helicopter. D: Drone. Yellow rectangles represent location of water sensitive papers on a 1.75 m (5.75 ft) spacing, centred on the treatment block. Flight paths were centred on the treatment block.
Helicopter versus drone experiment
For the helicopter treatments, five water sensitive papers (WSP) were spaced 1.75 m (5.75 ft) apart, centred on the treatment block. For the rotary drone passes, two rows of WSP were spaced 1.75 m (5.75 ft) apart, centred on the treatment block. Application volume was 50 L/ha (5 gpa)
The helicopter had a 20 foot boom with CP-03-05 nozzles on 12” spacing, alternating between a 0.062 (smallest) orifice and a 0.172 (largest) orifice. Ground speed was 96.5 km/h (60 mph) and altitude ranged from 1.5-3 m (5-10 ft) above the wheat heads. The contractor company calibrated the helicopter according to their standard operating practices.
The rotary drone was a DJI Agras T30 equipped with TeeJet TT110015’s. It flew at 5.1 m/s at 3 m above the wheat heads and applied three adjacent swaths of 4.5 m. The contractor company calibrated the drone according to their standard operating practices. A similar methodology can be found here.
Drone speed experiment
A single pass was made over three rows of WSP spaced 1.75 m apart, centred on the treatment block. The drone made two separate passes (n=2) for each speed. Samplers were retrieved and replaced after each pass and the same plot was used for all six passes. Application volume was 30 L/ha (3 gpa). Drone was refilled after every two passes to maintain a consistent weight.
The rotary drone was a DJI Agras T40 programmed to apply an “Extra Coarse” spray quality at 3.5 m above the wheat heads with a swath width of 9 m. Ground speeds were 2 m/s, 4 m/s and 7.2 m/s and were visually confirmed by the RPAS controller. Once again, the contractor company calibrated the drone according to their standard operating practices.
Target Locations
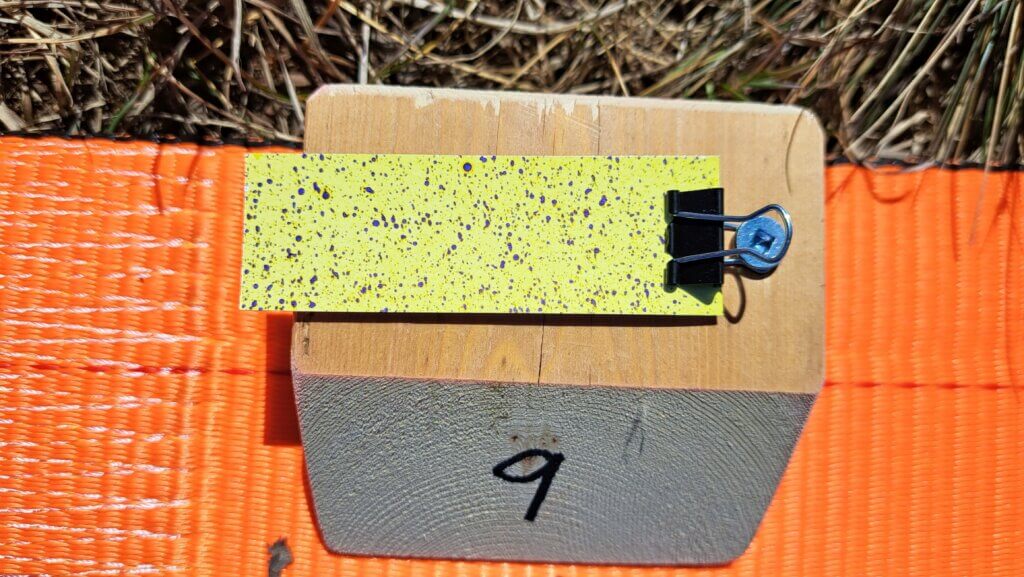
For both experiments, SpotOn brand WSP from the same production run was pre-curled by wrapping it around a pencil, then wrapped around the wheat head and secured at the bottom by a small, spring back paper clip (Figure 4). This left approximately 1.5 x 1 inches (i.e. half) of the surface exposed to spray and provided an indication of panoramic coverage.
The clip distorted the target by flattening it at the bottom and obscured a small portion of the target area, but this area was digitally removed during the analysis. By securing the WSP to the wheat head rather than a surrogate stake, the target moved naturally in the downwash of the drone. The papers were retrieved when dry, placed in individual plastic bags, flattened for scanning, and digitized using a DropScope within 24 hours of retrieval.
Figure 4. Pre-curled water sensitive paper was wrapped around the bottom of the wheat head and secured with a spring back paper clip.
Weather and Application Times
Weather data was collected using a Kestrel 3550AG weather meter (Kestrel Instruments) in a vane mount positioned 1.5 m (5 ft) above the wheat heads. Wind speed fluctuated throughout the day, but wind direction remained relatively stable at 90 degrees to the flight path. Targets remained within the swath, despite any offset, as indicated by the consistent coverage observed on the windward WSP compared to other, downwind samplers in each pass.
Application method
Pass #
Time
Windspeed (km/h)
Temperature (°C)
Helicopter
1
8:45
2.0
17.0
Helicopter
2
10:00
4.5
17.7
Helicopter
3
10:20
4.8
19.9
Agras T30
1
10:20
4.8
19.9
Agras T30
2
10:45
5.2
19.7
Agras T30
3
11:00
8.6
20.0
Agras T40
1
12:25
8.2
21.6
Agras T40
2
13:00
4.8
22.4
Agras T40
3
13:30
5.2
22.8
Wind direction remained a steady side wind (i.e. 90 degrees) to the flight path throughout day. Sky was clear (i.e. minimal to no cloud cover) throughout day.
Results and Analysis
WSP were scanned and digitized. Coverage was measured as percent surface covered (% area), and deposit density (# deposits/cm2). Given that only ½ of the WSP was exposed to spray, and the remining half was obscured during the wrapping process, the entire card was scanned, and the resulting coverage was doubled.
Helicopter versus drone experiment
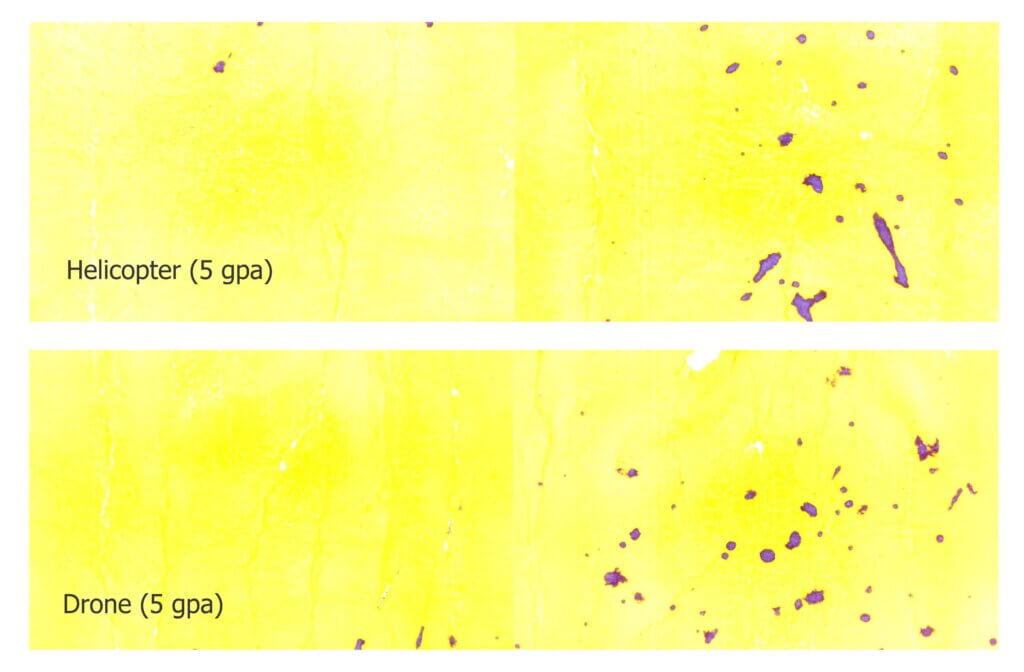
For each helicopter pass, a single line of five WSP were averaged to a single data point. Therefore, n=3, but represents 15 WSP samplers. For the drone, two lines of three papers were placed in the block. Each line was averaged to a single data point, for n=2 per pass x 3 passes for a total of n=6, representing 18 WSP samplers. The following image (Figure 5) shows a digitized WSP typical of each method.
Figure 5. Typical WSP from helicopter and drone applications at 5 gpa. Recall that only half the paper (the right half, in this case) was exposed following the wrapping process.
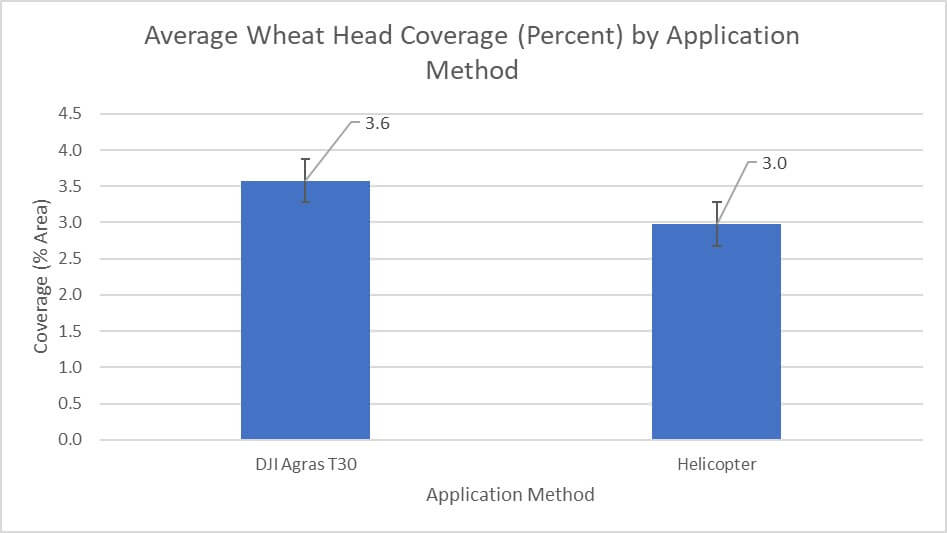
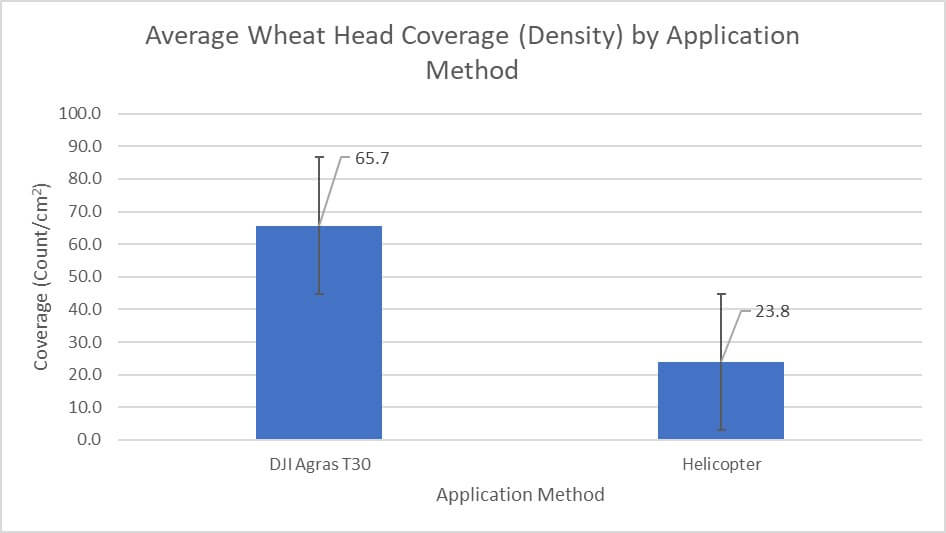
The following histograms (Figure 6 and 7) illustrate the mean coverage for each application method, with standard error.
Figure 6. Average wheat head coverage (percent area) by application method. Drone is n=6 and Helicopter is n=3. Bars represent standard error.Figure 7. Average wheat head coverage (deposit density) by application method. Drone is n=6 and Helicopter is n=3. Bars represent standard error.
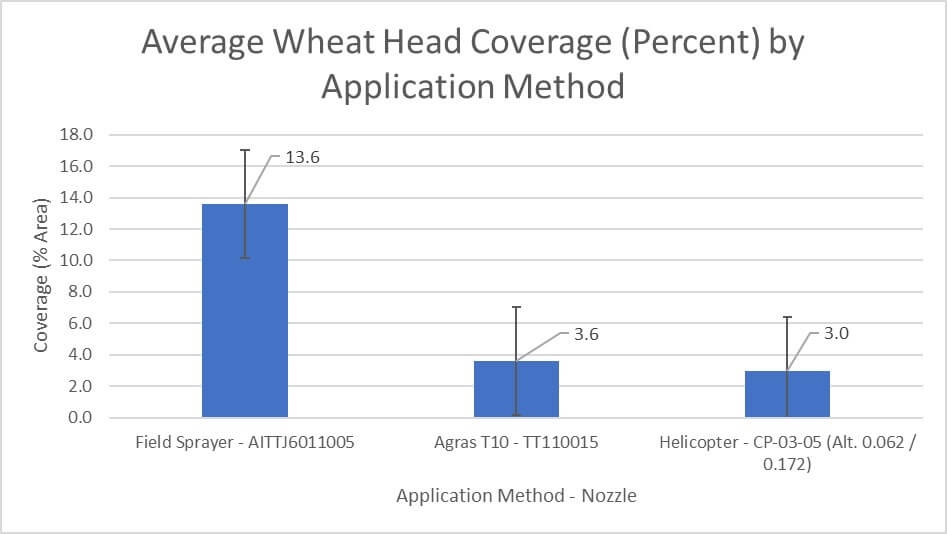
The drone covered an average 17% more surface area than the helicopter. The spray quality was visibly finer, as evidenced by the average 64% higher deposit count. As a matter of context, we ran a similar study four days later with a field sprayer running TeeJet AITTJ60’s on 38 cm (15 in) centres, 50 cm (20 in) above the wheat head. It applied 175 L/ha (19 gpa) compared to the 50 L/ha (5 gpa) applied by the helicopter and drone. The relative percent area covered is shown in Figure 8.
Figure 8. Average wheat head coverage (percent area) by application method. Drone (5 gpa) is n=6, Helicopter (5 gpa) is n=3 and Field Sprayer (19 gpa) is n=6. Bars represent standard error.
The more than fourfold difference in coverage from ground versus aerial application is significant, but given the relative concentrations of product applied (i.e. the same product rate) residue levels would likely prove equivalent for all treatments. Fungicide efficacy cannot be predicted from coverage data, but the convention is that the more surface area covered, the better the protection.
Drone speed experiment
The drone made two separate passes over each treatment block. For each drone pass, three lines of three WSP were placed in the block. Each line of three papers was averaged to create a single data point, for n=3 per pass and n=6 in total. The following histograms (Figures 9 and 10) illustrate the mean coverage for each application method, with standard error.
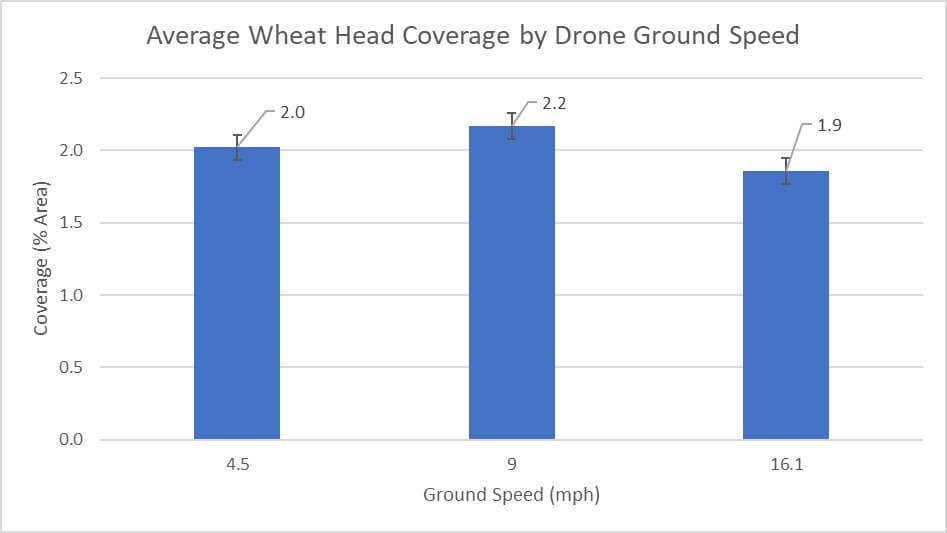
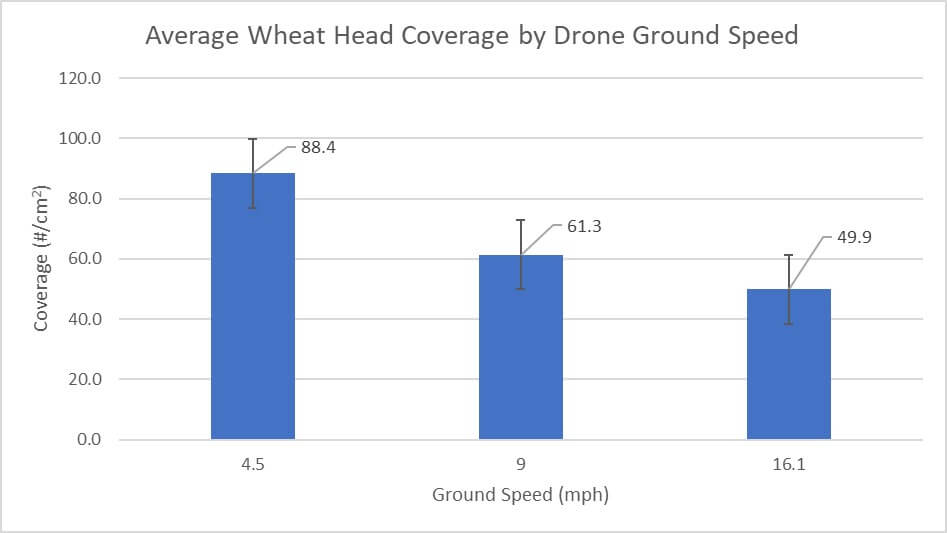
Figure 9. Average wheat head coverage (percent area) by ground speed. Each speed is n=6. Bars represent standard error.Figure 10. Average wheat head coverage (deposit density) by ground speed. Each speed is n=6. Bars represent standard error.
As an aside, note that the average is approximately 2% surface area for these 30 L/ha (3 gpa) applications compared to the 3.6% average at 50 L/ha (5 gpa) in the drove versus helicopter experiment, reflecting the results from many studies that show employing higher water volumes results in improved coverage until some point of diminishing return.
The drone appeared to cover approximately the same surface area at all three speeds. However, when deposit density is considered, the slowest speed deposited 31% more droplets than the medium speed, which in turn deposited 23% more droplets than the fastest speed.
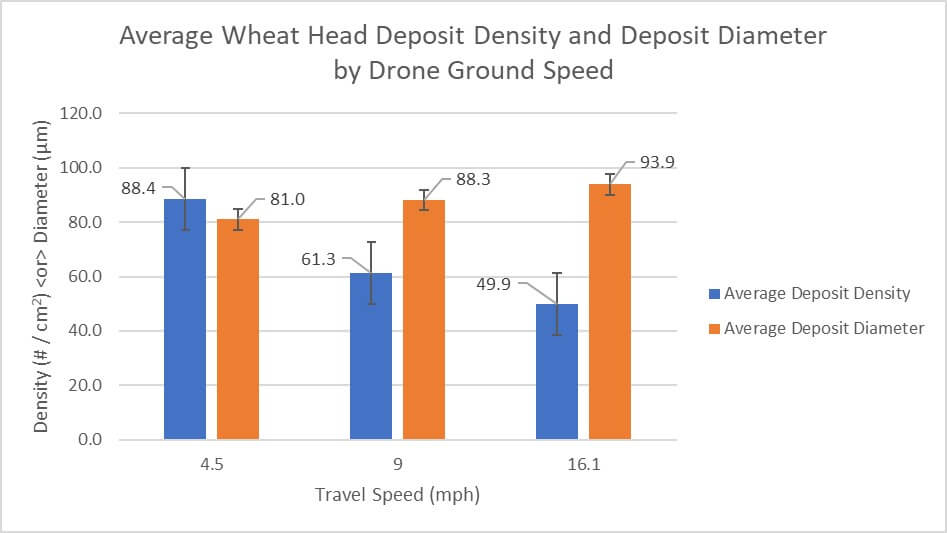
One possibility is that higher speeds, which are known to create wider swaths, dispersed the spray over a larger area. Another possibility is that higher speeds, which are known to increase drift potential, left a greater proportion of droplets aloft, beyond the reach of the samplers. Yet another non-exclusive possibility is that deposit counts increased while overall surface coverage remained approximately equal because the diameter of the stain increased with speed. DropScope reports stain diameter, and this has been graphed alongside the deposit counts in Figure 11.
Figure 11. Deposit counts share an inverse relationship with ground speed, but average stain diameter shares a direct relationship with ground speed.
We see an inverse relationship between ground speed and deposit density, but a direct relationship between ground speed and stain diameter. This difference may appear small, but assuming stains are approximately circular, diameter can be used to calculate deposit area, per the following table.
Drone Ground Speed (mph)
Mean Coverage (%)
Mean Deposit Density (#/cm2)
Mean Stain Diameter (µm)
*Mean Stain Area (µm2)
4.5
2.0
88.4
81
5,153.0
9
2.2
61.3
88.3
6,124.0
16.1
1.9
49.9
93.3
6,793.0
*Assumes a circular deposit
We see an increase in average deposit area of 16% and 10%, respectively, for each increase in speed. In previous trials conducted in corn in 2022 we saw a decrease in coverage and an increase in drift when drone ground speed was increased. We also observed that as the T40’s ground speed increased, the swath width appeared to increase. We did not measure effective swath width at different speeds, but if this observation is correct then droplet density by area would decrease at higher speeds. The loss of spray to drift and/or through increased swath width would explain why increased speed resulted in fewer deposits on the wheat heads.
The increased deposit diameter is likely due to spread factor. Higher ground speeds would impart a higher droplet velocity and therefore cause droplets to spread more on impact. If this is the case, and had we conducted residue trials, we would predict an inverse relationship between ground speed and residue levels, despite having similar percent surface coverage. This observation underpins the importance of assessing deposition patterns as well as residue in coverage trials.
Conclusions
For this use case, a drone applying 50 L/ha (5 gpa) produces a similar, if slightly higher, percent coverage on a wheat head compared to a helicopter applying the same volume. However, the deposit density is considerably higher.
Corroborating previous results in corn, drone application volume has a direct relationship with spray coverage.
For this use case, drone ground speed does not appear to affect the percent wheat head area covered, but there is an inverse relationship with deposit density. We theorize based on the direct relationship between ground speed and deposit spread, and prior evidence of increased drift with higher ground speed, that less active ingredient is deposited on the wheat head at higher ground speeds.
The relationship between downwash (i.e. dwell time, which is a function of downwash air energy and ground speed), wheat movement and coverage is unclear.
Acknowledgements
Thanks to Zimmer Air, Drone Spray Canada, Bayer Canada, Grower-Cooperator Adam Pfeffer and OMAFRA SEO student Vanessa Benitz.
Calibration is a fundamental step in any spray application. To apply the correct product rate, we need to know how much liquid per unit land area is deposited under the sprayer.
To conduct the calculations, either manually or through the drone software, we need to know the width of the spray swath. This task requires the operation of the sprayer under typical conditions, some kind of sampler capture the spray deposit, and a means of quantifying that deposit so the spray pattern becomes apparent. Here’s how we do it:
1. Confirm the accuracy of the flow meter
Drones don’t typically report the spray pressure of the spray mix. Instead, they report the flow rate using a built-in flow meter. The drone maintains the desired application rate by using the flow rate to adjust pump speed and engage nozzles over a range of travel speeds. Because everything depends on the flow meter, its accuracy needs to be verified.
Fill the spray tank with clean water and flush all the lines.
Install nozzles required for task, ensuring all nozzles are identical and in good working order.
Nozzles installed on DJI T20 drone.
Select the nozzle size you installed on the spray monitor.
Purge the air from the system.
Activate the spray and wait for the flow rate to stabilize on the spray monitor. This may take a few moments.
With the nozzles flowing, place collectors under each nozzle and collect the spray liquid for a fixed time, say one minute.
Capturing spray during flow meter calibration.
Ensure the collector catches all the spray. Buckets often create turbulence. Rotary atomizers make this more difficult.
When the time elapses, remove the collectors and then shut off the spray.
Unless the shutoff is very fast and positive, leaving the collectors in place during shutoff can introduce error as the flow diminishes.
Confirm that the volume collected from each nozzle was identical, and that the flow rate reported by the drone flow meter is accurate.
Repeat to ensure consistency.
Use of a Spot-On digital calibrating cup ensures that all spray is captured and it also reports the volume instantly.
2. Measure the swath width
Spray swath width is variable. For a measurement to be relevant we must evaluate spray deposition under environmental conditions that are similar to the planned spray operation, as well as use the same operational settings such as altitude, travel speed, nozzle choice, and application volume.
Spray samplers are positioned along the ground, perpendicular to the flight path. We use water-sensitive paper (WSP) because it’s readily available, fast and easy to use, and the deposits can be analyzed visually or using simple apps that calculate coverage. We create a sampling line of WSP positioned a 1 m intervals (or maybe 0.5 m for narrow swaths). The samplers should extend to twice the expected swath width to account for any swath displacement from sidewinds.
Choose a day with light, consistent winds.
Find an open space free of obstruction in the direction of the prevailing wind.
Install a weather station to document conditions during flight.
A Kestrel 3550AG or 5550AG wind meter can record weather data and download to a phone via Bluetooth.
Mark an approximately 200 m long flight line into the prevailing wind direction by placing wire flags every 50 m.
At the 150 m mark, use wire flags to centre a sampler line perpendicular to the flight path. Sampler line length should be about twice the expected swath width.
Swath sampling line
Wooden blocks with paper clips can be used to secure WSP at regular intervals along the sampler line.
Wooden blocks attached to a 4″ tow strap allows for easy setup and movement of sampling line.
Fill the drone 1/2 full.
Manually fly the drone along the entire flight line. The spray pressure, flow rate and altitude of the drone should be stable before it reaches the sampler line. This may take 25 meters or more depending on drone model, flight speed and drone weight.
Fly 50 m past the sampling line without any drone maneuvering to avoid affecting the deposit.
Land the drone and walk along the sampler line.
Note the deposits in the central region. Walk along line as the deposits taper off, looking for deposits that are approximately 50% of the average central deposits.
Water-sensitive paper following a drone application.
Estimate the distance between these deposits on both edges of the swath. This is the estimated swath width that can be entered for the second flight.
Replace the WSP with a fresh set, refill the drone to 1/2 full, and repeat the flight two more times.
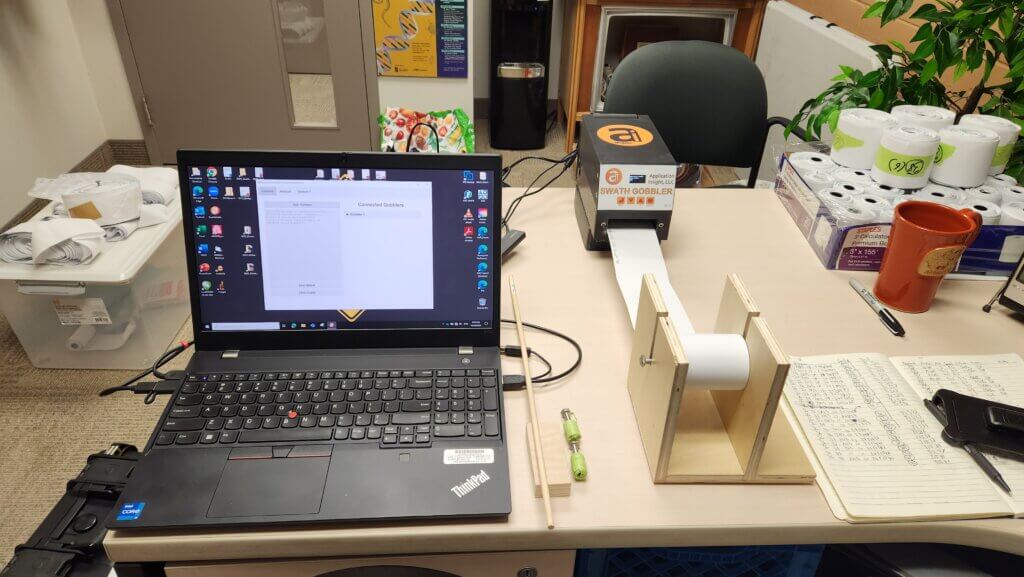
Other methods perform a more advanced assessment by analyzing the entire swath, and not just intervals. These methods use dyes and dedicated hardware to quantify the deposits along strings or paper samplers.
The Swath Gobbler documents swaths at high resolution using lengths of 3″ bonded receipt paper, food grade dye, and a digital scanner.The Application Insight LLC Swath Gobbler scanner in action.
3. Analyze the Pattern
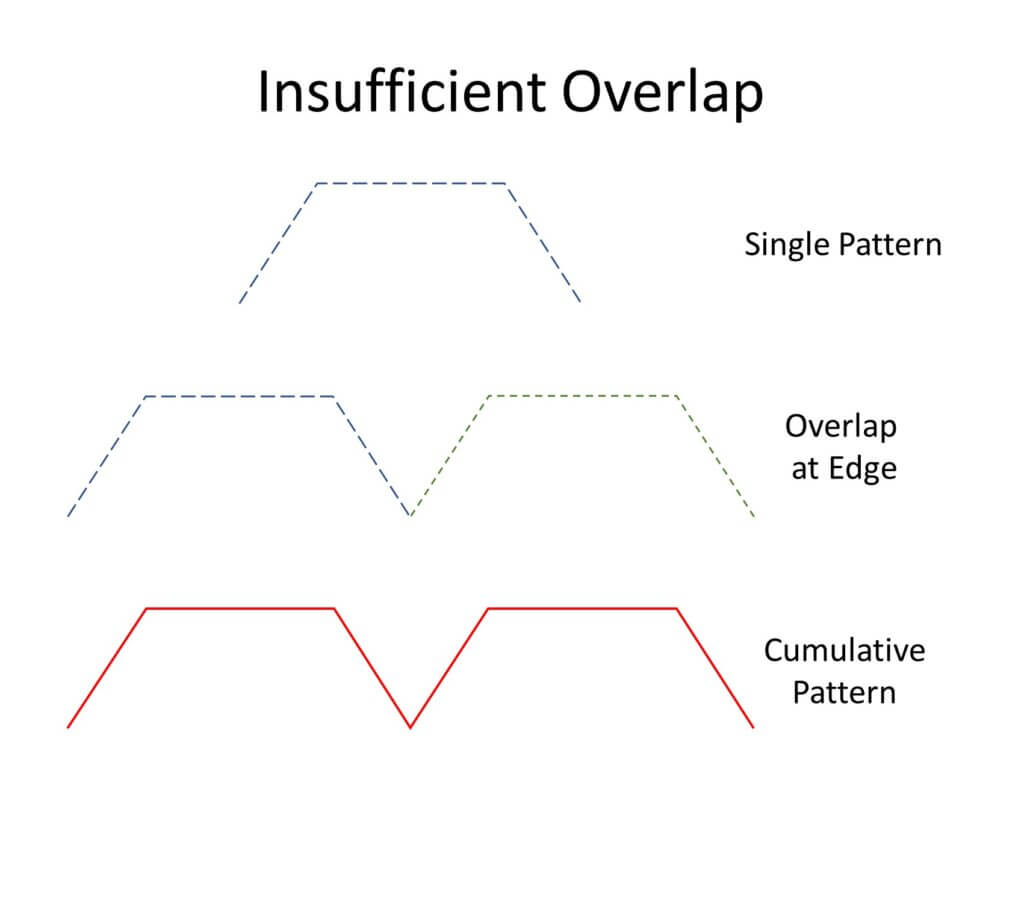
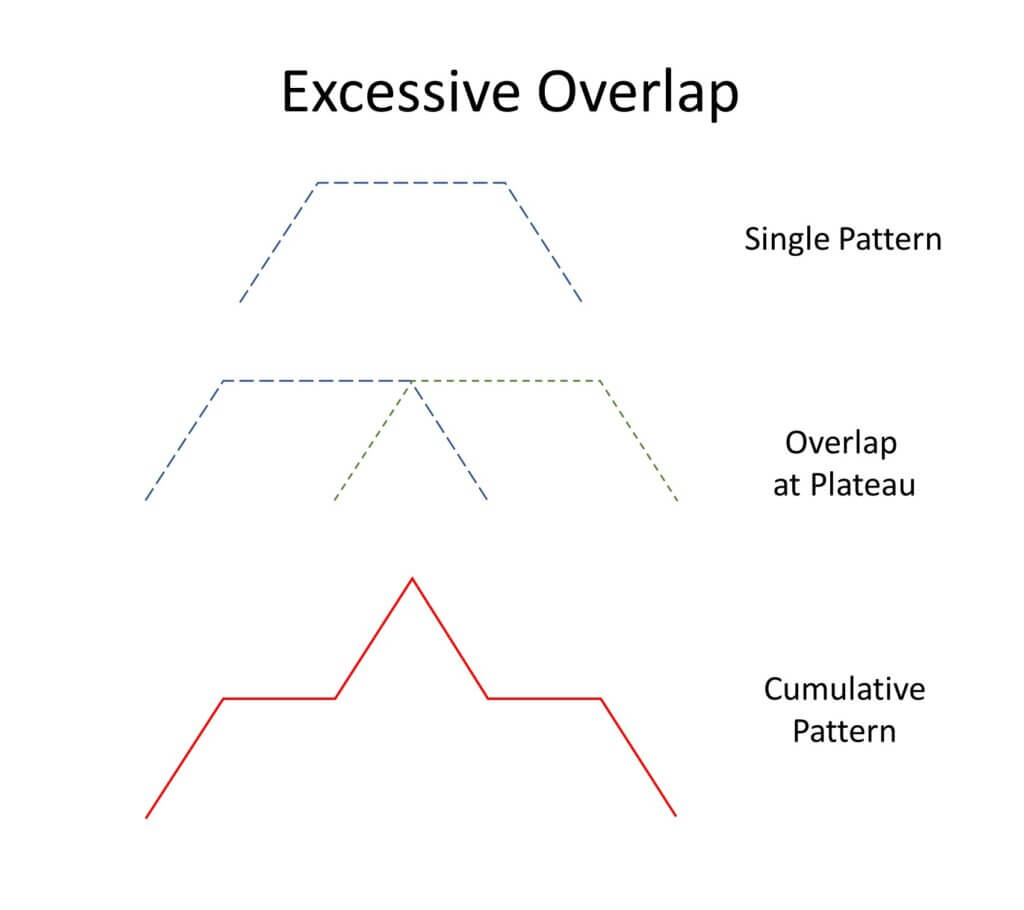
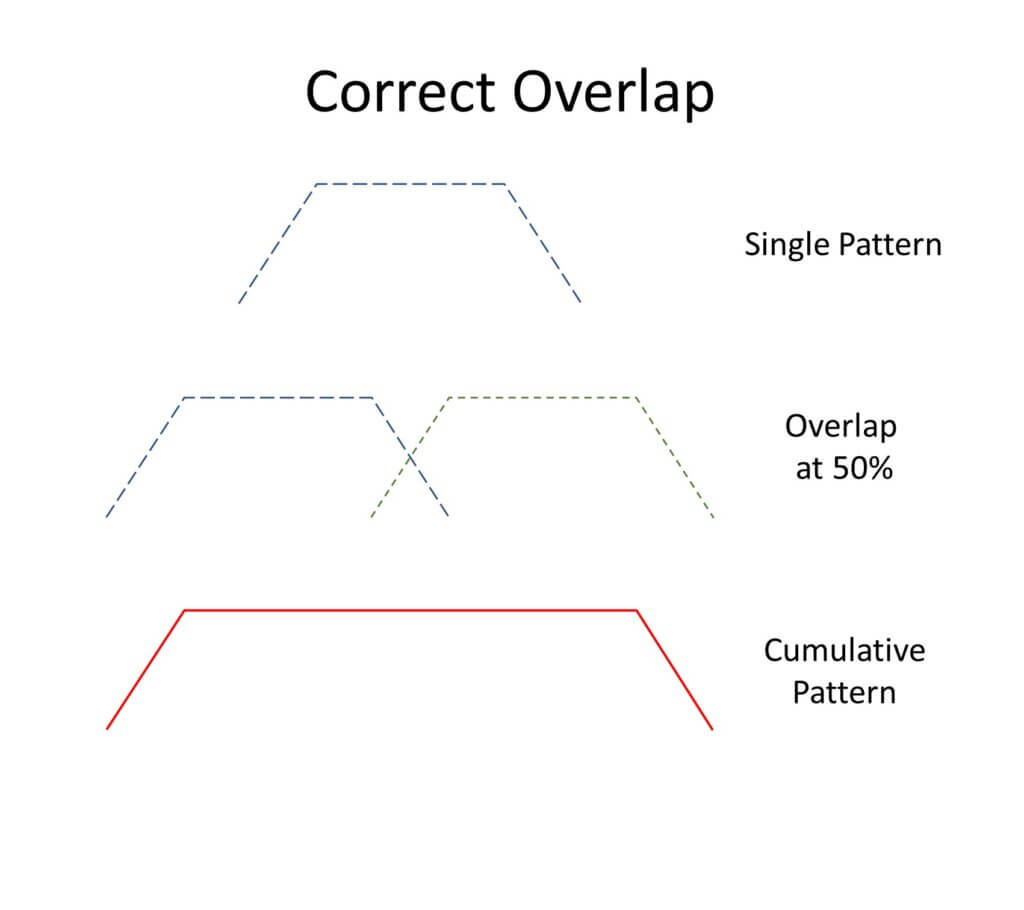
The nearest approximation for drone swathing is that of a manned aircraft. The spray pattern of an aircraft is tapered, meaning the highest deposition is near the centre of the swath, and the edges of the swath fade to zero deposit. In order to achieve consistent coverage, we need the edges of the spray swath to overlap so the cumulative coverage at the edges is closer to that in the centre. Too little overlap leaves gaps and too much overlap results in excessive deposit.
Insufficient overlap creates gaps in coverageExcessive overlap results in over-dosing and wasteCorrect overlap is necessary for efficient and effective application.
Deposits from drones can be highly variable. The challenge is to find an overlap distance that minimizes this variability, minimizes both over- and under-application, and maximizes swath width. Download a copy of our Excel spreadsheet to help you with this process.
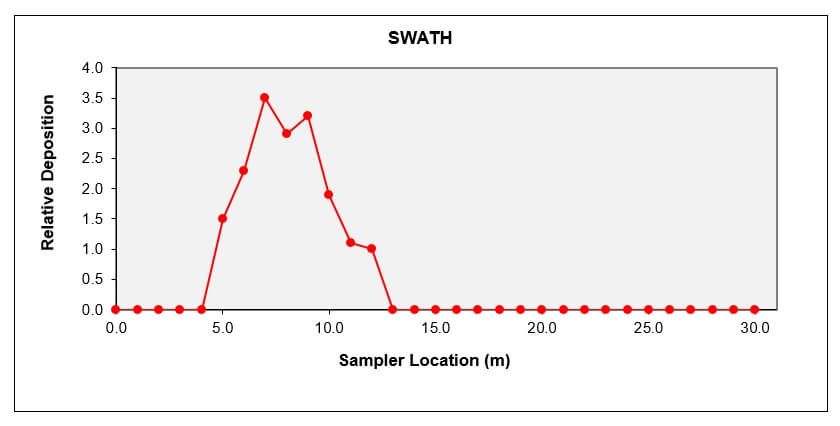
The first step is to estimate a reasonable average deposit, called “Threshold”. Graph the deposits from each sampler, and estimate a point on the Y axis (Relative Deposition) that represents the average maximum deposit. This could be the maximum value of the plateau, or a midpoint between the maximum and a nearby dip. This is the Threshold. We then take 50% of this estimated average deposit, and find the two distances on the X axis (Sampler Locations) that intersect the curve at these points. The distance between these two points is our first estimate of the swath width. If two adjacent swaths are spaced so the edge of one overlaps 50% with the next, the overall cumulative deposit should be relatively even.
The coverage information from each sampler location is graphed to create a deposit pattern.
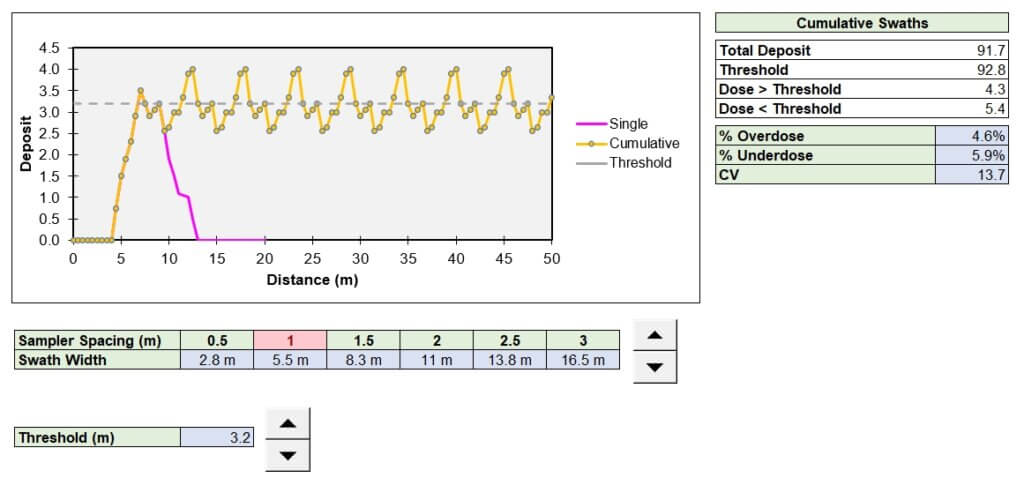
We can alter the amount of overlap to improve the apparent uniformity, but be cautious. For example, even though we can often improve the uniformity by narrowing the swath width, this can add deposit to the area under the drone and raise the overall deposit amount. Plus, the narrower swath also lowers the productivity of the drone. Use the Excel model to establish a swath width that has the lowest variability (Coefficient of Variability or CV) AND results in a balance between over- and under-dosing.
The amount of overlap is adjusted to minimize variability (CV) and both equalize and minimize over- and under-dosing.
4. Recognize the factors that influence swath width
Operational use case affects swath width
Swath width is affected by altitude, speed, water volume and spray quality. Generally, higher altitudes, lower volumes, and finer sprays will result in a wider swath. Unfortunately, the same configuration also results in greater drift. It is recommended that swath widths be determined for each spray volume and nozzle arrangement that will be used.
Drones will be applying low water volumes and this requires a critical assessment of coverage to ensure the deposit density is sufficient to achieve the desired result. A low volume will require a finer spray for minimum coverage to be realized. Coarser sprays that reduce drift and evaporation will need higher water volumes and result in narrower swaths. Significant time may need to be invested to understand the effects of operational settings and environmental conditions on spray deposit uniformity and swath width.
Effective Swath Width and the Agronomic Use Case
The relatively sparse coverage at the extremes of the measured swath width may be insufficient to elicit the desired biological result. The Effective Swath Width (ESW) represents the segment of the total swath width that results in pesticide efficacy. In some use cases, the two widths can be similar, but typically the ESW is only a fraction.
The difference is influenced by the “Agronomic Use Case” which includes factors such as:
Spray mix rheology (i.e. the interaction of spray mix viscosity and atomizer design on droplet size)
Minimum effective dose: This is a complex relationship between coverage, spray mix concentration and pesticide mode-of-action that results in an effective result while minimizing the environmental impact.
Target location (e.g. a pest within a dense canopy or a weed on relatively bare ground)
Taken collectively, research has shown a 20-30% reduction in ESW for corn, wheat and soybean fungicide applications compared to swaths measured on open ground. Conversely, herbicides sprayed on bare earth or sparse vegetation can produce an efficacious response 20% wider than the measured swath width. The impact of agronomic use case on ESW must be considered during mission planning.
Additional pointers
Here are a few tips and tricks to help you be successful when calibrating your drone.
Drone patterns will have deposit peaks and valleys in the central region. Repeated runs are needed to confirm that these are real and persistent. If so, then adjustments in flying height, spray quality, or water volume may be needed to eliminate them.
The absence of pressure gauges on drones can be corrected by installing an analog gauge in-line with one of the spray nozzles. If may be necessary to mount an auxiliary camera on the drone to record this gauge. We have observed strong fluctuations in spray pressure, particularly on starting a spray swath, that were not reflected in the reported flow rate.
A pressure gauge can be plumbed into a drone without affecting flight behaviour. A camera is trained on it to read pressure during a flight.
Many drones have the option of recording the flight screen during a mission. This will provide a record of the performance of the drone, and can be valuable should performance problems arise.
Although swath width calibration is done by flying into a headwind, the actual spray application should be done with a side wind. Start at the downwind edge of the field and turn into the wind. The drone is symmetrical and the tapered spray patterns should equalize the deposits. Alternately, flying into a headwind and returning with a tailwind can alter the aerodynamics of the spray deposition process, alternating between a wider and more narrow swath width, respectively.
Drone spraying will walk a razor’s edge of sorts – there is little room for error when using scant water and fine droplets. Getting the basics right has never been more important.