Swath width is a fundamental parameter in spray drone mission planning. It facilitates the uniform application of broadacre pesticides at the target rate. Pilots adjust the swath width via operational settings such as droplet size, flight speed and altitude to produce the most effective and efficient application.
Rapid advances in drone design, however, may warrant a re-evaluation of how operational settings affect swath width. For example, the most recent generation of drones are now capable of speeds up to 20 m/s (72 km/h), which is twice that of the previous generation.
In late 2025 we conducted a series of comparative herbicide applications using the DJI Agras T50 and T100. For both drones, swath width increased with speed up to ~10 m/s, as expected. However, between ~10 m/s and 18.5 m/s, swath width from the T100 did not seem to increase further. Similar observations have been reported by researchers at AgroEfetiva (São Paulo, Brazil; personal communication).
These results suggest that the relationship between speed and swath width is positive and direct at lower speeds, but reaches a saturation point beyond which any further increase in speed no longer affects swath width. This is an asymptotic relationship. To test this hypothesis, we conducted a deposition study where swath width was measured at flight speeds that increased incrementally from 8 m/s to 20 m/s.
Configuration Study
The standard T100 configuration uses two rotary atomizers (“sprinkler” nozzles; LX07550SX) with a reported maximum combined flow rate of 30 L/min. The alternate orchard configuration incorporates a boom that supports two additional “mister” nozzles (LX09550SX), increasing the reported maximum flow rate to 40 L/min.
To improve productivity in broadacre applications, some operators have adopted a hybrid configuration. In this setup, the orchard boom is retained, but the reputedly drift-prone mister nozzles are replaced with a second set of sprinklers. This approach is intended to achieve a higher flow rate than the standard two nozzle configuration while maintaining a larger mean droplet size.
A secondary objective of this study was to compare the Hybrid configuration with the Orchard configuration (Figure 1).
Figure 1 – Left: DJI Sprinkler Nozzle (LX07550SX). Four such nozzles comprised the “Hybrid” configuration. Right: DJI Mister nozzle (LX09550SX). Four such nozzles comprised the “Orchard” configuration.
Materials and Methods
Location and Layout
The study was conducted at Ontario’s Simcoe Research Station on May 12, 2026. The site (42.857414, -80.271759) was a flat, recently tilled sand/loam field with no vegetation present. A DJI Agris T100 drone was used to perform the spray applications, supported by the D-RTK 3 relay station and flown on full auto.
The spray mix was 0.2% v/v Super Signal Blue (Precision Laboratories) and 0.125% v/v Activate Plus NIS (Winfield United) in municipal water, pre-mixed to ensure consistency. A volume of 40 L – 60 L was maintained throughout the trial to minimize the effect of a changing payload.
The sampler was a flat, horizontal, continuous bond paper strip measuring 7.5 cm wide and 30 m long (secured in Speed Tracks™, Application Insight LLC). The sampler was oriented perpendicular to the prevailing wind, with the intention of flying the drone with a headwind across the 15 m mark (the centre) (Figure 2). Test passes determined that the T100 required 210 m to reach 20 m/s while half-full.
Figure 2 – T100 spraying indicator dye across the 30 m continuous sampler.
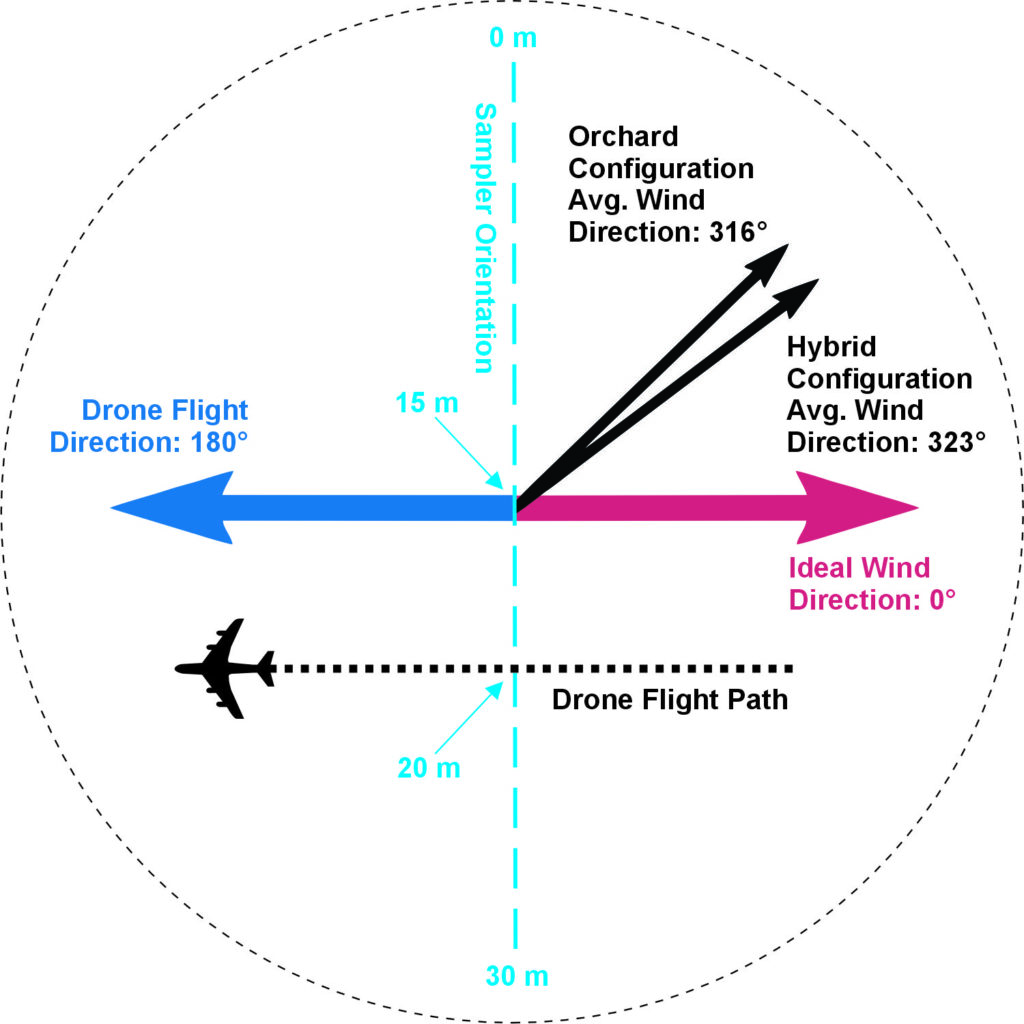
Before the swathing runs began, the prevailing wind shifted direction slightly. It was decided to fly the drone 5 m upwind (at the 20 m mark along the 30 m sampler) to ensure any downwind displacement was captured on the sampler (Figure 3).
Figure 3 – Trial layout and prevailing wind conditions.
Drone Settings and Swathing Order
The primary objective of the study was to explore the effect of flight speed on swath width. Speed was increased from 8 m/s to the maximum 20 m/s by 2 m/s increments. Trial and error with the controller indicated that we could achieve these speeds by balancing an application volume of 30 L/ha and a programmed swath width of 7 m.
Altitude was set to 4 m which is lower than the 5 m minimum recommended by DJI for high-speed flight. This was a compromise above the preferred 3.5 m altitude we have historically used with the T50. It was felt that higher altitudes would create unacceptable potential for swath displacement.
Rotary atomizer design is not standardized, and as a result, the droplet size selected on the controller did not necessarily produce the desired results. The Hybrid configuration was programmed to emit 350 µm droplets, selected as a compromise between drift mitigation and coverage potential. To offset the Mister nozzles’ reputation for producing a finer spray, the Orchard configuration was set to the maximum 500 µm. Operations settings are noted in Table 1.
Configuration
Nozzle
Droplet size (µm)
Speed (m/s)
Altitude (m)
Programmed Swath Width (m)
Application Volume (L/ha)
Hybrid
4 Sprinklers
350
8, 10, 12, 14, 16, 18, 20
4
7
30
Orchard
2 Misters, 2 Sprinklers
500
8, 10, 12, 14, 16, 18, 20
4
7
30
Table 1 – Operational settings for trials.
Three repetitions of seven speeds were flown for each configuration. Anticipating an increase in temperature and wind speed throughout the day, it was decided move through all seven speeds (a single repetition) before resetting and doing so two more times. The intent was to preclude confounding weather effects. Ideally, we should have alternated between configurations as well, but this proved impractical. As a result, we flew the Hybrid configuration first and the Orchard configuration last.
Weather
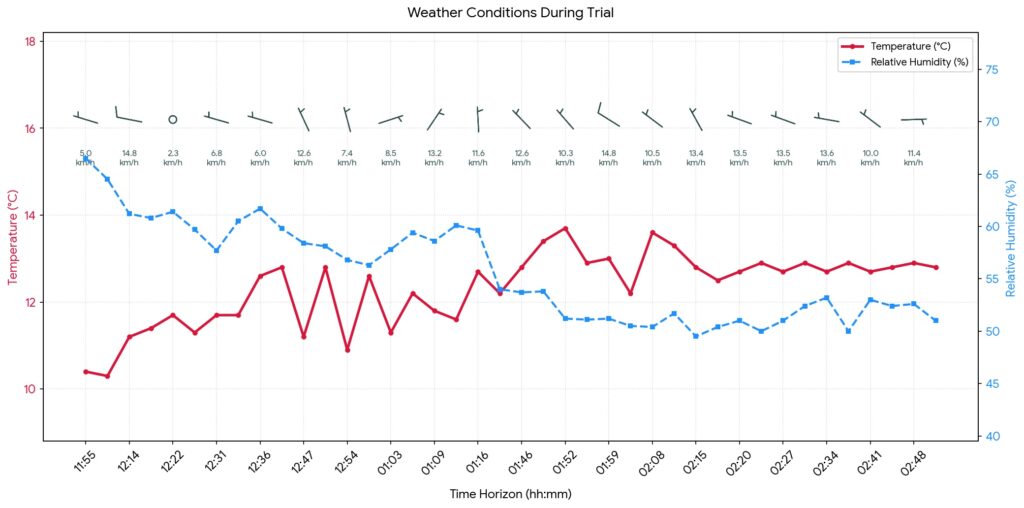
Weather data was collected using a Kestrel 3550AG weather meter (Kestrel Instruments) in a vane mount positioned 2.5 m above ground. Temperature and relative humidity were comparable throughout the ~3 hours of data collection, but as anticipated, wind speed was higher for the later Orchard configuration passes.
As previously indicated, wind direction shifted from an ideal headwind situation just before trials began, and was somewhat changeable, but the average wind direction for the two configurations was comparable (Figure 4 and Table 2).
Figure 4 – Weather conditions recorded at roughly 10-minute intervals, corresponding to the drone passing over the sampler.
Time
Configuration Flown
Average Temperature (°C)
Average Relative Humidity (%)
Average Wind Speed (km/h ± SD)
Average Direction (° ± SD)
11:55 am – 1:16 pm
Hybrid
11.7
59.9
8.4 ± 3.5
323 ± 46
1:43 pm – 2:52 pm
Orchard
12.9
51.6
11.9 ± 2.5
316 ± 48
Table 2 – Average weather conditions for the Hybrid configuration passes and for the Orchard configuration passes.
Collector analysis
Bond paper digitization
Bond papers were scanned using a Swath Gobbler™ (Application Insight LLC). The software measured deposition as both percent area covered (% area) and deposit density (deposits/cm2) every 100 mm, with a thresholded Hue of 23-280, a Saturation of 5-120 and a Value of 156-255.
Effective swath width calculation
The large data set produced by each pass was reduced in size by averaging the deposition for every 50 cm. This data was entered into our Excel-based swath width calculator, which assumes a racetrack pattern and sums deposits from adjacent swaths. The resulting swath width for each pass was the maximum width that minimized over- and under-dosing as well as the coefficient of variation (CV).
Analysis
The average swath width derived from deposit density data was wider than that derived from percent area covered (Table 3).
Table 3 – Group means and standard deviation for average swath widths derived from deposit density data and percent coverage data. The average CV was between 29 and 32%.
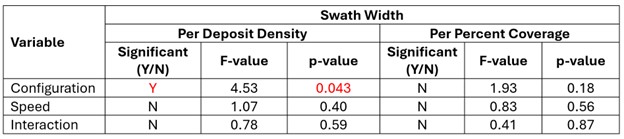
A two-way ANOVA (Analysis of Variance; α = 0.05) was performed to determine any significant effect of speed or configuration on swath width (Table 4). Flight speed had no significant effect on swath width, no matter how it was derived (% area covered or deposit density), for either configuration (Hybrid or Orchard). However, the average swath width derived from deposit density was significantly wider for the Orchard configuration compared to the Hybrid and presented higher variability.
Table 4 – Results of two-way ANOVA, exploring interactions between speed, swath width and configuration (95% confidence interval).
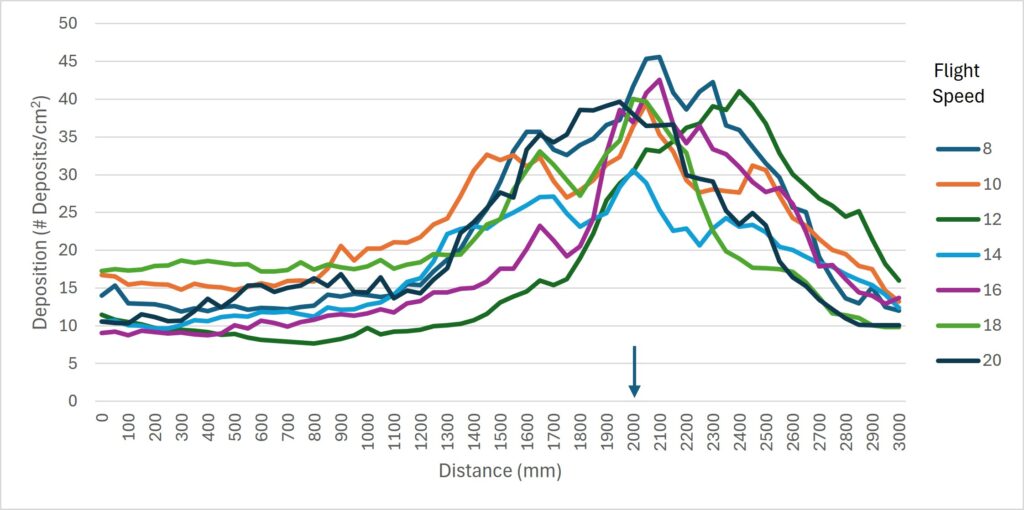
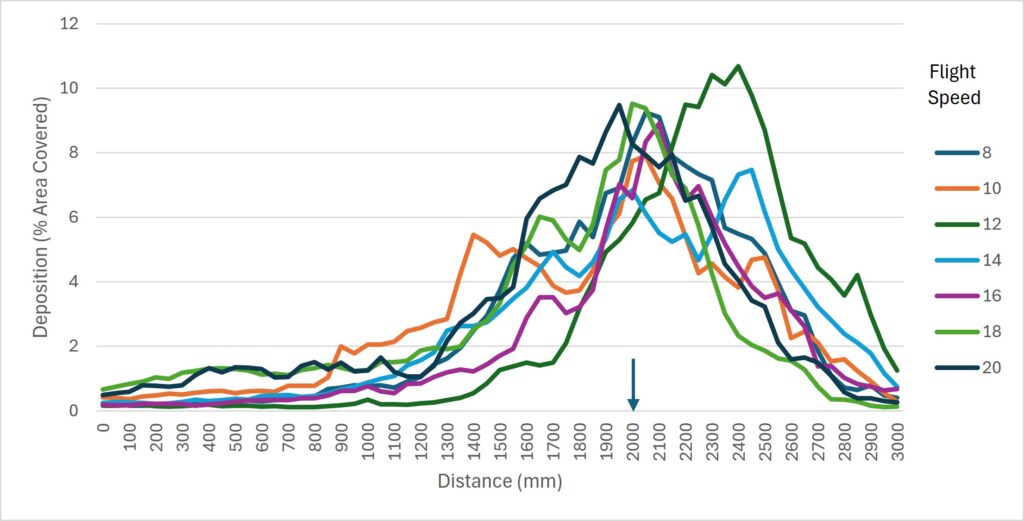
Orchard configuration was prone to displacement in a side wind. Shifting the flight path 5 m upwind improved the downwind capture, but for some flights it did trim a small portion of the upwind deposition. Deposit density gives greater resolution and exposes more variability than percent area covered. Figure 5 shows the average deposition by speed based on deposit density. Figure 6 shows the average deposition by speed based on percent area covered.
Figure 5 – Average deposition by speed based on deposit density. Arrow indicates flight path.Figure 6 – Average deposition by speed based on percent area covered. Arrow indicates flight path.
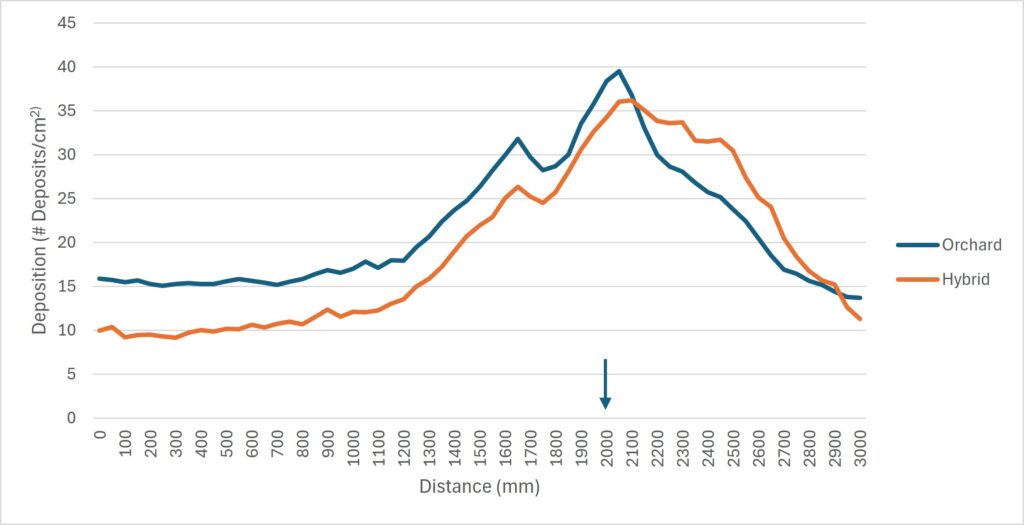
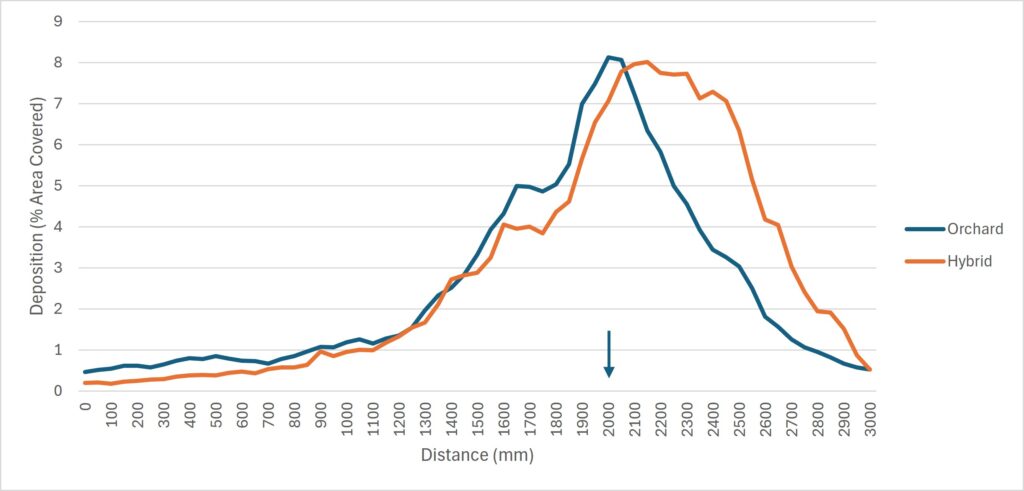
Figure 7 shows the average deposition by configuration based on deposit density. Figure 8 shows the average deposition by configuration, based on percent area covered. Based on deposit density, there were 55% more deposits on the downwind side of the sampler for Orchard configuration set to set to 500 microns compared to the Modified configuration set to 350 microns.
Figure 6 – Average deposition by configuration based on deposit density. Arrow indicates flight path.Figure 8 – Average deposition by configuration based on percent area covered. Arrow indicates flight path.
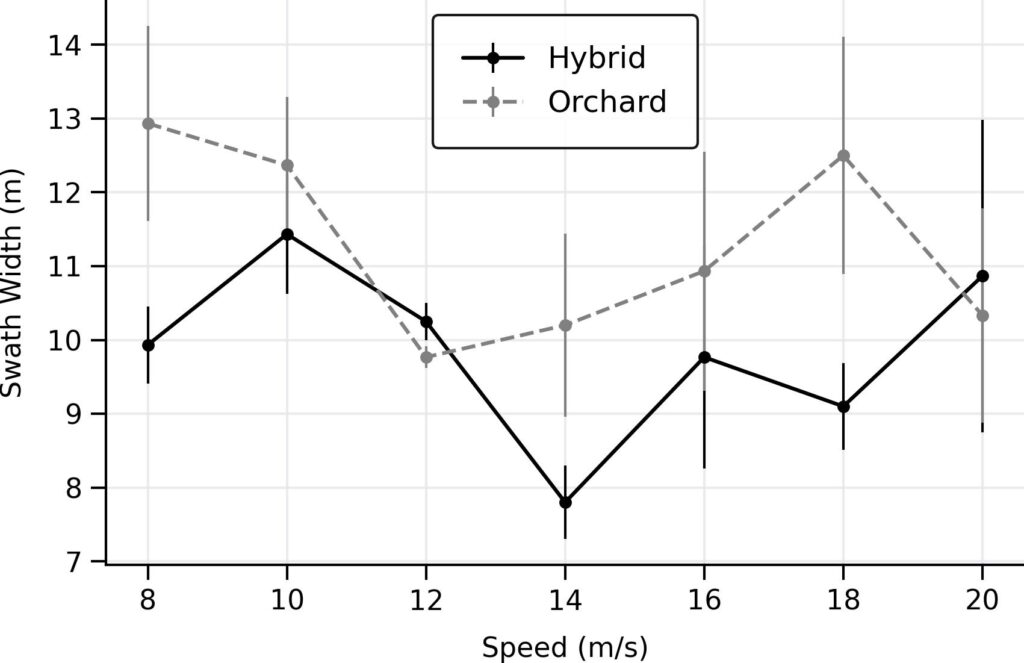
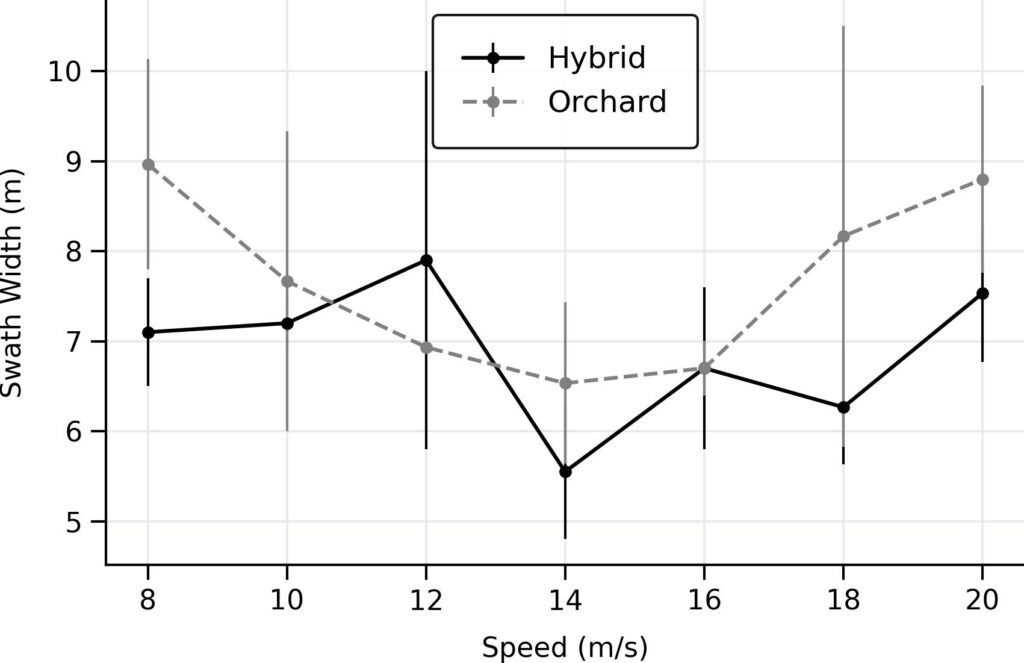
The average swath widths calculated from percent area covered (Figure 9) and deposit density (Figure 10) are shown with standard deviation. While it appears the swath width is less around 14 m/s, it is statistically insignificant and the response to speed is essentially flat.
Figure 9 – Average swath widths for each speed, derived from percent coverage data. SD shown. n=3 for each speed, while n=2 for Hybrid configuration at 12 m/s and 14 m/s.Figure 10 – Average swath widths for each speed, derived from deposit density data. SD shown. n=3 for each speed, while n=2 for Hybrid configuration at 12 m/s and 14 m/s.
Observations
Previous studies demonstrated a direct and positive relationship between drone speed and swath width up to 8-10 m/s. Here, we see no further response after ~8 m/s. This supports the hypothesis that rotary-wing drone speed and swath width share an asymptotic relationship that inflects at ~8-10 m/s. Variability makes it difficult to determine an exact value.
Despite increasing the programmed droplet size to the maximum 500 microns for the Orchard condition, there was 55% more downwind deposition compared to the Hybrid condition, which was set to 350 microns. This supports the claim that the Mister nozzle produces a span of droplet sizes that include far more fines than the Sprinkler nozzle, and underpins the need for a better understanding of the spray quality produced by rotary atomizers.
Spraying at high speeds is not an advisable practice. While swath width is no longer affected after ~8 m/s, there are other considerations. Note that it required 200 m for the drone to reach the highest speed, and in a related study we have seen swath width taper during initial acceleration and final deceleration, leaving gaps in coverage.
Further, the minimum 5 m altitude advised by DJI ensures a safe margin for the drone to respond to obstacles and topography during high speed flight, but is not conducive to spraying. The author is aware of a situation where flying the T100 at 4 m altitude and 18 m/s over a canola field with rolling hills caused it to perform an emergency landing.
An ideal speed is one that maintains the most consistent swath width at a reasonable altitude.
Thanks to Drone Spray Canada and Bayer Canada for in kind and financial support, and thanks to Cesar Cappa, OMAFA horticulture weed specialist for his participation in the study.
Remote Piloted Aerial Application Systems (RPAAS) or Unmanned Aircraft Spray Systems (UASS) are generally referred to as drones. They are an increasingly common tool for pesticide delivery in modern agriculture. They offer flexibility and access to difficult terrain, are capable of broadacre and patch applications, and facilitate air-assisted applications over perennial canopies. As with all application technologies, careful attention to fundamentals, safety, stewardship, and regulatory compliance remain the cornerstones of responsible use.
This document summarizes current best management practices for pesticide handling and application using drones. It is intended to support training and adoption for operators from a wide range of backgrounds. Given the rapid evolution of drone design and the changing regulatory landscape, key considerations are addressed without being overly prescriptive.
Categorization and the Canadian Legal Environment
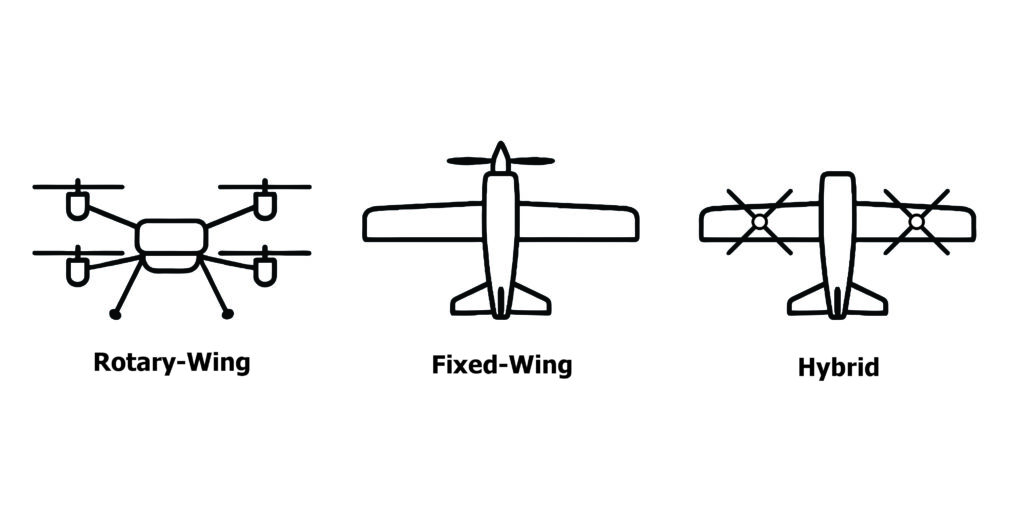
Drones can be divided into three design categories (Figure 1):
Rotary-Wing: Single or multi-rotor, these drones employ vertical take-off and landing (VTOL) and can hover during spraying. They have relatively short flight times and low volumetric capacity.
Fixed-Wing: Resembling crewed airplanes, these drones require a runway for take-off and landing. They have relatively long flight times, operate at higher speeds and have more volumetric capacity.
Hybrid: Encompassing a range of designs including, for example, parasail-wing and VTOL-wing, this design combines aspects of rotary drones with the speeds, flight times and volumes of fixed-wing designs.
Figure 1 – Common drone designs.
Drones are also categorized by weight, which is used to define their legal use:
Small Drones (250 g to 25 kg): Typically have tank sizes up to 12 liters and speeds less than 25 km/h (10 m/s).
Medium Drones (25 kg to 150 kg): Typically have tank sizes ranging from 12 to 70 liters and a maximum speed of 25 km/h (10 m/s).
Large Drones (>150 kg): Typically have tanks >70 liters and a maximum speed of 72 km/h (20 m/s).
Pesticide use is regulated by both federal and provincial governments to protect human health and the environment. Anyone applying pesticides must ensure they are registered for use in Canada and must comply with all applicable federal and provincial/territorial requirements. Provincial rules vary, and it is the responsibility of the drone operator to understand and follow the requirements in their jurisdiction.
Transport Canada: Certification
Drone pilots must follow Canadian Aviation Regulations (CARS) Part IX. Drones must be registered and marked, and the pilot must carry valid pilot’s certification.
Table 1 – Drone Operational Categories and Pilot Certificates
Basic
Advanced
Level 1 Complex3
Age minimum for certification1
14
16
18
Fly in visual line-of-sight
Y
Y
Y
Closer to or over people2
N
Y
Y
Small drones
Y
Y
Y
Medium drones
N
Y
Y
Large drones4
N
N
N
Controlled airspace (air traffic control permitted)
N
Y
Y
Sheltered operators (small drones only)
N
Y
Y
Extended visual line-of-sight
N
Y
Y
Beyond visual line-of-sight
N
N
Y
1In Canada, you must be at least 16 years old to apply pesticides. 2Flying at an advertised event is considered a special operation, requiring permission. 3Operating a drone over 150 kg in Canada is classified as a high-complexity, specialized operation requiring a Special Flight Operations Certificate (SFOC) from Transport Canada. 4Operations with large drones are medium-complexity special operations and require SFOC permission.
Health Canada: Pesticide Labels
Health Canada is responsible for approving the registration of pesticides across Canada. Pesticide labels are legal documents and set rules on how a pesticide can be used. They define application rates, equipment settings, mixing instructions, environmental precautions, personal protective equipment (PPE), restricted-entry intervals, and disposal instructions.
As pesticide labels are updated to reflect drone applications, it is recommended operators consult Health Canada’s Pesticides Regulatory Directorate (formerly known as the Pest Management Regulatory Agency) pesticide label search tool for the most recent version. The pesticide must be registered for use on the target crop and pest and be permitted for application by drone. Questions regarding product label interpretations and uses can be directed to the Pesticides Information Service at pesticides-info@hc-sc.gc.ca.
Mission Planning
Proper field mapping and mission planning leads to safe and successful flights. Map obstacles, no spray zones, buffer zones, sensitive area/crops, areas of human activity, terrain, etc. Be aware that these conditions may change if planning occurs too far in advance of the spray day. Always check for relevant Notice to Air Missions (NOTAM), ensure the airspace is not restricted, and be aware of any other aircraft operating in the area.
Staging Area
Ideally, the staging area should be identified and prepared prior to the spray day. Select and clear a location for filling, take-off and landing that is safe for the operator, crew and equipment.
The staging area should present clear lines of sight and support efficient operations.
Drones should never fly over, or too close to busy roads.
The staging area should be upwind of the target site to reduce operator exposure to drift.
Bystanders must be at a safe minimum distance, as defined by the nature of the operation.
The operator and crew must be a safe distance from the drone during take-off and landing. Flying over crew is prohibited.
When spraying large fields, moving to an alternate staging area can save unnecessary ferry time, increasing efficiency and reducing battery strain.
Identify and be prepared to use connecting points and perform a manual landing when needed.
Drone tendering systems vary in size, complexity, cost and capacity, depending on the nature of the operation. For example, licensed exterminators (that is, those paid to spray properties other than their own) may have additional needs beyond what is listed here.
Mixing
Drone tanks are small and lack agitation. Therefore, most tendering systems include a nurse tank for pre-blending and agitating batches of spray mix. This helps ensure that active ingredients dissolve and disperse fully, that suspension products stay mixed and that the target site receives a consistent mix.
Water quality determines pesticide effectiveness; hardness, bicarbonate, pH, and turbidity can antagonize or degrade products. Water quality testing allows operators to correct potential problems before spraying. Higher spray volumes (that is, liters per hectare or gallons per acre) enable proper mixing and have been shown to improve spray coverage.
The act of mixing (and filling) carries the highest risk of operator exposure and environmental contamination. PPE requirements must be observed, and operators should avoid distractions or hurried work. Mix only the amount required for the task; leftover pesticide mixes create disposal problems and safety risks.
Fill the nurse tank halfway with clean water. Backflow prevention (for example, a valve or air gap) protects the water source.
Measure and add the pesticide, following the mixing order on the label and allowing time for each tank mix partner to dissolve and disperse. Tank mixing must be permitted on the label of each tank mix partner. Mixing multiple products at high concentration greatly increases the possibility of physical and/or chemical antagonism. If compatibility is in question, contact the manufacturers for guidance and conduct a jar test well in advance of spraying.
Rinse jugs and measuring tools into the nurse tank.
Top up with water and maintain agitation throughout the operation.
Transfer the spray mix into the drone tank using the most closed system available.
Filling and Battery Management
Rotary-wing drones carry relatively small spray volumes, so refills and battery swaps occur frequently. Large models, for example, might have a 10-minute flight cycle, where the refilling and battery swap processes are simultaneous and comprise less than 2 minutes.
Filling
Haste and inattention increase the chance of spills, overflows and leaks during refilling. This represents unnecessary point source contamination and operator exposure and must be avoided. While drone refills currently involve quarter-turn-valved faucets, or gas-station-style automatic fuel nozzles, neither are ideal. Industry is developing alternatives. Ensure filling is performed with the most closed system available.
Batteries
Batteries, like the drone, carry spray residue and must be handled using PPE. Some battery chargers feature water baths, misters or air conditioning. If water-cooled, treat the water as pesticide‑contaminated and dispose of accordingly. Batteries charge more efficiently and last longer if charged in a cool, ventilated location. Charge according to the manufacturer’s instructions.
Operator Comfort
Drone operations are physically and mentally taxing. Attention to operator comfort improves safety and efficiency. Even seemingly minor accommodations have positive impacts:
Folding chairs combat operator fatigue.
RV awnings, umbrellas, foldable Bimini-style tops or flip-up doors provide shade.
Wear ear protection and consider lower-decibel equipment (for example, inverter gas generators are comparatively quiet, and electric pumps are even quieter).
Enclose or locate loud components far from the filling area to reduce noise and emission exposure.
Elevated Platforms and Flight Decks
Line-of-sight and Connectivity
While “beyond visual line-of-sight” operations are allowed under specific, authorized conditions, most current regulations require operators to maintain a visual line-of-sight with the drone. This supports swath alignment, obstacle avoidance, an ongoing assessment of drift risk, and general operational safety.
Operating from an elevated platform can help maintain visual line-of-sight and improve connectivity between the flight controller and the drone. Real-Time Kinematic (RTK) is a satellite positioning technique that enhances GPS/GNSS data to provide centimeter-level accuracy in real time. An RTK platform will improve connection reliability and drone accuracy. Satellite internet providers can supplement connectivity in regions with unreliable cellular coverage. Be aware that network latency varies with provider.
The safest approach is for the pilot to control the drone from an elevated platform while a loader performs refill and battery-swap procedures on the ground. However, if operating off a flight deck:
Long flight decks keep landings and lift-offs at a safer distance.
Decks with pull-out platforms or hydraulic wings can increase the operating area and can be adjusted to account for adjacent roads and the slope of the ground.
A security rail around the landing area can prevent a drone from slipping off; A falling drone is expensive, but falling or sliding into an operator is a disaster.
An enclosed operations area can improve operator safety and comfort.
Remember, the operator should be focused on the drone/controller when flying; Flight is not an opportunity for performing other tasks.
Cleaning
Proper cleaning prevents cross‑contamination, maintains equipment lifespan, and avoids crop injury from residues. Perform cleaning away from open water and ensure rinsate is disposed of responsibly. Follow the pesticide label and adhere to the manufacturer’s instructions on allowable cleaning methods. The following recommendations do not supersede either resource.
Triple‑Rinse Procedure
Multiple, small-volume rinses are more effective than a single, large-volume one. Follow the triple-rinse procedure:
Ensure the drone tank is as empty as possible.
Fill the drone tank 1/4 full of clean water and, with a partner, agitate by rocking the tank (if removable).
Flush the rinse water through the plumbing and nozzles.
Repeat the process twice more.
Employ a similar procedure to remove residues from the nurse tank plumbing systems. Important reminders when cleaning:
Use a cleaning agent in the second rinse if recommended by the label. Soaking may be required.
While the drone exterior should be rinsed, avoid pressure washing (to protect electronics) unless explicitly permitted by the manufacturer.
Cameras and Lidar will not function if they are covered in residue.
Commercial drone residue removers are available to assist in keeping the drone clean.
Wash or dispose of PPE according to label and local regulations.
Swath Width and the Operational Use Case
For now, consider swath width to be the total width of the area covered in a single pass. Swath width is a fundamental variable for mission planning, ensuring the pesticide is applied at the correct rate and (in the case of broadacre operations) as uniformly as possible. A drone’s swath width is highly variable and affected by several factors, collectively referred to as the “Operational Use Case”. These factors include:
Drone design (for example, atomizer type and location relative to the rotors)
Operational settings (for example, altitude and travel speed)
Meteorological conditions (for example, wind speed, wind direction, relative humidity)
Operational Settings
When configuring a rotary-wing drone for a mission, pilots select operational settings on the controller. The three settings that have the most influence on droplet behaviour, and consequently swath width, are droplet size, flight speed and altitude. A single change alters several other influencing factors, but the cumulative impact on swath width and drift potential is clear (Table 2).
Table 2 – Effect of rotary-wing drone operational settings on swath width and drift potential.
Variable
Change
Effect on Swath Width
Effect on Drift Potential
Droplet size
Coarser
Narrows
Reduces
Droplet size
Finer
Widens1
Increases
Flight speed
Faster
Widens2
Increases2
Flight speed
Slower
Narrows
Reduces3
Altitude
Higher
Widens1
Increases
Altitude
Lower
Narrows
Reduces3,4
1Coverage uniformity and overall number of deposits within the swath reduced due to downwind displacement and drift. 2Current evidence suggests that at high speeds (>10 m/s) there may be a plateau where there is little or no further change to swath width or drift. 3Lower speed and/or lower altitude will increase the influence of downwash on droplet behaviour. 4Low altitude may not permit sufficient overlap of the spray from each nozzle, creating gaps in coverage.
Meteorological Conditions
Spray released from a drone (or any aerial sprayer) is highly susceptible to environmental conditions. Drift potential increases when:
conditions are calm (inversion risk)
windspeed is too high (physical drift)
conditions are changeable (gusting and wind direction)
conditions are hot and relative humidity is low (droplet evaporation)
Operators must observe label recommendations, local laws, and use good judgment to minimize drift potential. Practical methods include:
increasing droplet size
increasing volume
adjusting passes (particularly along buffer zone) to account for swath offset
halting operations when conditions favour movement toward sensitive habitat / crop / residential areas.
Be aware that drift-reducing adjuvants have an unpredictable impact on the droplet size produced by current rotary atomizer designs. Until rotary atomizer design is standardized and tank mixes can be evaluated, do not assume adjuvants will work as intended.
Downwash
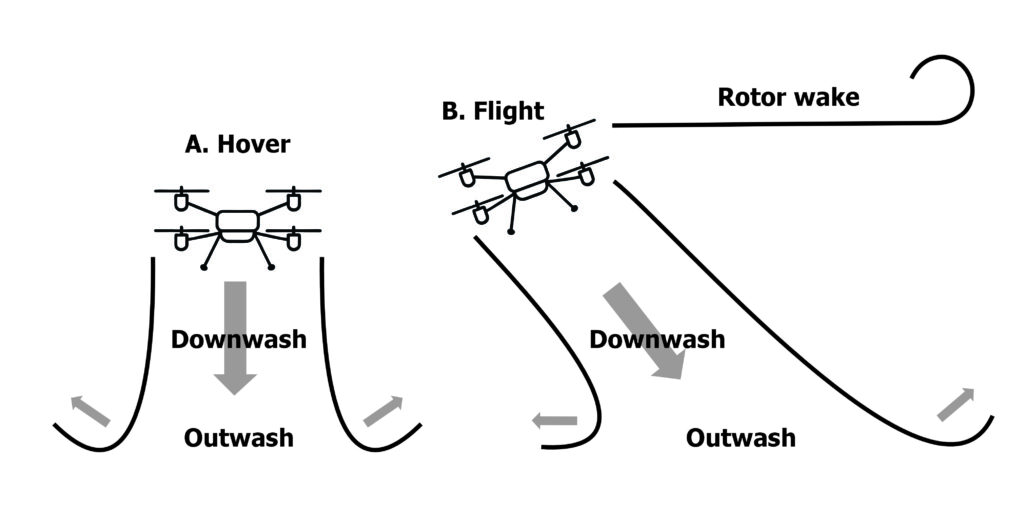
When a rotary-wing drone hovers, each rotor draws air from above and accelerates it downward in a high-velocity blast. The result is a vertical component referred to as the “downwash” and the turbulent splash of air that hits the ground and spreads laterally is the “outwash”. Droplets released beneath a drone at hover are almost completely entrained by the downwash. The majority get driven to the ground and then move laterally along the outwash, while a small portion (likely smaller droplets) recirculate back up through the rotors (see Figure 2a).
Most rotary-wing drones have fixed-pitch rotors, so the entire drone must tilt forward to enter low-speed flight. This causes the column of downwash to tilt backward. While the downwash is created by lift, “wake turbulence” is created at the tips of the rotors as high-pressure air beneath the rotor wraps around to the low-pressure area above. As the drone flies at low speed (~3 m/s) the wake can be visualized as a pair of counter-rotating, cylindrical vortices that trail behind. Spray is still mostly entrained by the downwash on a downward and rearward vector with deposition aligning closely to the flight path. However, a portion will get caught in the wake (see Figure 2b).
Figure 2 – A. Rotary-wing drone at hover creates a high-energy downwash directly below the drone. B. Rotary-wing drone at low-medium flight speed trails a lower-energy downwash and creates a rotor wake.
The effect of higher speed flight has not yet been fully characterized. However, there is evidence that the downwash will detach from the ground, directing the spray further back and with lower energy. This exposes droplets to deflection by wind and shifts a greater proportion of the spray into the rotor-tip vortices (that is, the wake). This makes higher speeds undesirable, as they result in increased drift and an unstable and unpredictable swath. There is evidence that at some point this relationship with speed may plateau, where there is no further change to swath width or drift.
Practical Impact
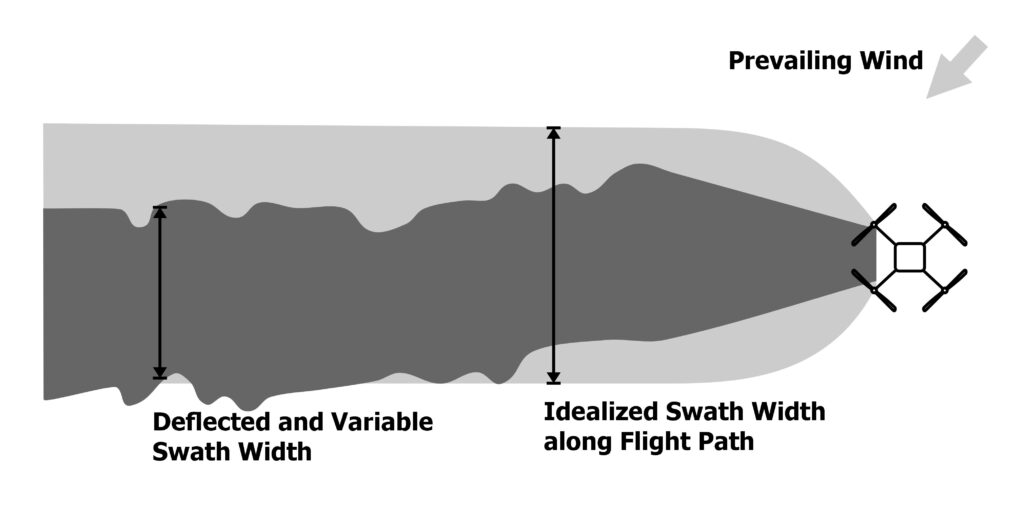
Operational settings, meteorological conditions and the downwash have a cumulative effect on droplet fate. Consider the following operational use case: A rotary-wing drone spraying back and forth over rolling topography will experience changing wind speed and relative direction. The drone will respond by changing drone pitch, rotor speed and pump flow to maintain the desired altitude, travel speed, and application rate. Meanwhile, the drone gets lighter as it sprays, thereby reducing the magnitude of the downwash. Ultimately, this results in a swath width that expands and contracts and may shift back-and-forth or be consistently offset along the flight path (Figure 3).
Figure 3 – Swath width and swath position along the flight path is variable.
Evaluating Swath Width
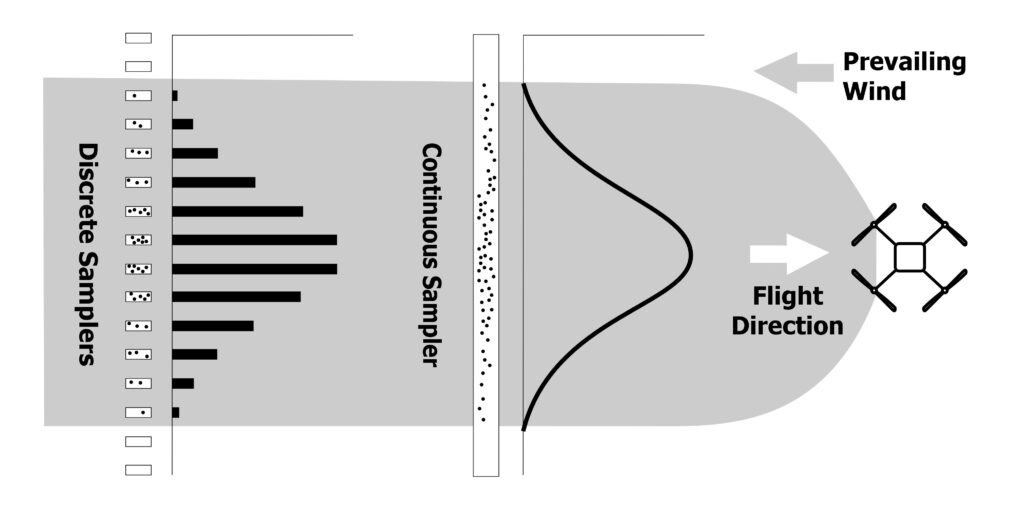
A drone’s swath width for a given operational use case must be determined through testing. The drone is first calibrated according to the manufacturer’s instructions. Swathing methods vary, but generally the drone is flown into the prevailing wind over a series of samplers (for example, discreet samplers like water sensitive paper or continuous samplers like string or bond paper). Multiple passes are required to capture the variability that occurs along the flight path (Figure 3).
A rotary-wing drone does not deposit droplets uniformly across its swath. There are fewer droplets at the extremes and more directly beneath the drone. This can be envisioned as a bell-shaped curve with a tight span and a high peak (Figure 4). This curve will skew with any lateral wind.
Figure 4- Methods for testing swath width.
We must now refine the concept of swath width. Many drone manufacturers report the distance between the furthest detectable deposits as the swath width. However, variability within that span (specifically, the amount of active ingredient deposited, or the percent-area covered, and/or density of deposits) means the efficacy of the application can also be variable.
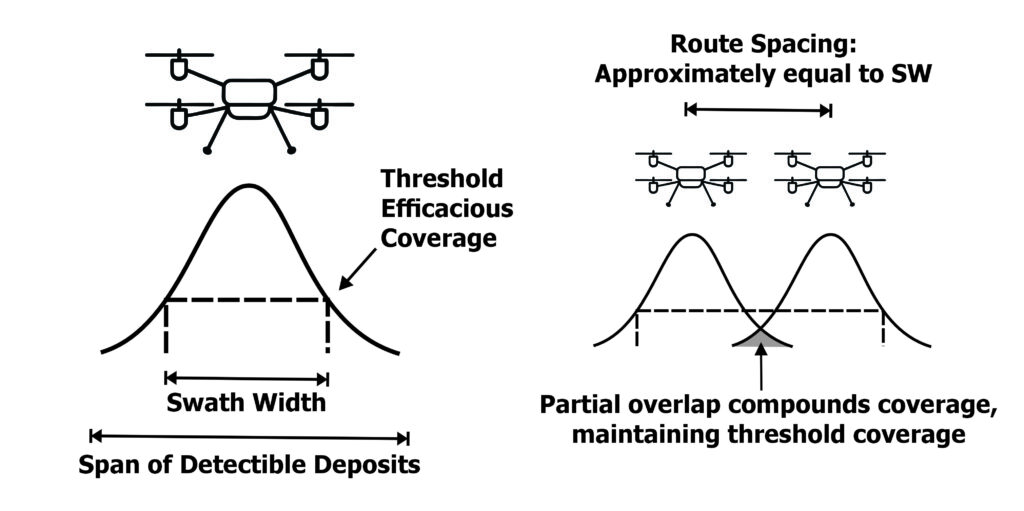
A more realistic and efficient estimate of swath width is one that presents the lowest variability (as indicated by the coefficient of variability, CV) while minimizing the degree of over- and under-dosing. This calculus requires an estimate of the coverage threshold that represents a minimum efficacious dose (that is, “how much is enough?”). Traditional aerial swath measurements estimate this as 90% of the maximum deposited. Online tools are available to help calculate the swath width from the span of detectible deposits.
This new definition of swath width matters during mission planning. The route spacing entered into the flight controller describes distance between passes over the target area, but this setting is independent of swath width. For instance, if the calculated swath width is 9 m, then entering a route spacing of 10 m will not change it. Therefore, if a uniform broadcast application is desired, the route spacing should match the swath width, which is often less than the span of detectible droplets (see Figure 5).
Figure 5 – Matching route spacing to swath width results in a more uniform, broadacre application. Curves and thresholds shown here are conceptual and not intended to be realistic.
Effective Swath Width and the Agronomic Use Case
The relatively sparse coverage at the extremes of the calculated swath width may or may not be sufficient to elicit the desired biological result. This can happen if the estimate of threshold efficacious coverage is incorrect, or some other factor affects deposition.
The Effective Swath Width (ESW) redefines the concept, relying on efficacy, and not a measure of deposition, as a means for determining swath width. The two approaches can result in similar distances, but quite often they are different. For example, in the case of most fungicide applications, the ESW (or the actual width of biological impact) is only a fraction of the SW (the estimated width calculated from deposition testing). The degree of deviation is influenced by the “Agronomic Use Case” which includes factors such as:
Minimum effective dose: This is a complex relationship between coverage, spray mix concentration and pesticide mode-of-action that results in an effective result while minimizing the environmental impact.
Target location (for example, a pest within a dense canopy or a weed on relatively bare ground)
Spray mix rheology (that is, the interaction of spray mix viscosity and atomizer design on droplet size)
Minimum Effective Dose
This is best explained by example. Consider a systemic herbicide and a contact fungicide.
A systemic herbicide mixed according to the label will kill weeds with less volume per hectare and less target coverage than is required for some fungicides and insecticides. Specifically, a systemic herbicide can still be effective at the extremes of the swath, where there is less coverage. The higher residues found in the middle of the swath are excessive, which may or may not be a liability. For example, certain crops directly beneath the drone (such as horticultural crops or GMO’s with stressed metabolisms) may experience phytotoxic damage. A contact fungicide requires relatively higher coverage and may not be effective at the extremes of the swath.
Therefore, two missions with identical operational use cases, but different agronomic use cases, can present the same swath width during testing, but have different effective swath widths.
Target Location
Spray coverage diminishes with canopy depth. The degree depends on crop morphology and planting architecture, as well as certain operational settings such as volume, droplet size and flight speed. Simply put, a plant canopy filters out spray droplets, and this occurs both vertically and laterally. This is not represented during typical swath measurements, which tend to take place on bare ground.
Spray Mix Rheology
Most conventional hydraulic nozzle designs adhere to an international standard. This allows the operator to determine the size of droplets produced for a given operating pressure and flow rate. Droplet size is a not only a critical factor in mitigating drift and improving spray coverage, but it is often a defined pesticide label requirement.
Currently, most rotary-wing drones employ rotary atomizers. This atomizer design is not standardized, and as a result, the droplet size selected on the controller will not necessarily produce the desired results. Studies have shown that changes in tank mix partners, concentrations, the inclusion of adjuvants, the flow rate and the atomizer design can produce droplets far larger or far smaller than intended.
Further, some atomizers are prone to “flooding” when the flow rate exceeds the atomizer’s capacity, and this produces a volume of larger, less-effective droplets.
Until rotary atomizers are standardized (or there is a return to conventional nozzles), operators can only select the desired size and infer the results based on in-flight behaviour and observing the size of the stains left on samplers during swath width testing.
Practical Impact
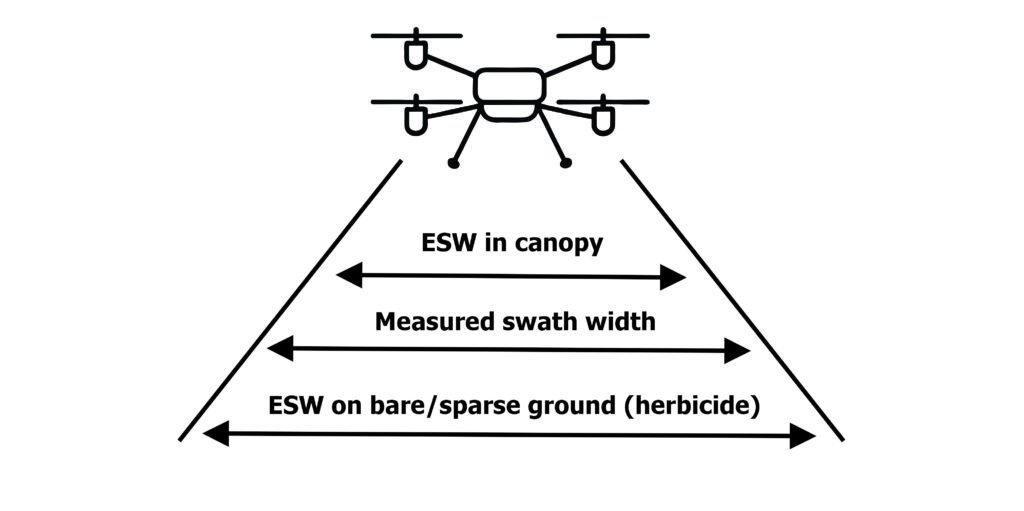
Taken collectively, research has shown a 20 to 30% reduction in ESW for corn, wheat and soybean fungicide applications compared to swaths measured on open ground. Conversely, herbicides sprayed on bare earth or sparse vegetation can produce an efficacious response 20% wider than the measured swath width (see Figure 6).
The impact of agronomic use case on ESW must be considered during mission planning, as this may warrant further adjustments to route spacing.
Figure 6 – Measured swath width versus effective swath width for different agronomic use cases.
Acceleration and Deceleration
Swath width produced by a rotary-wing drone varies with flight speed, up to an estimated (but not yet confirmed) limit of approximately 10 m/s. As a result, swath width increases as the drone accelerates at the start of a pass and decreases as it decelerates toward the end.
Unlike crewed aircraft—which reach and maintain target speed before spraying—current software limitations prevent drones from separating flight and treatment zones. Consequently, swath width is inconsistent over approximately the first and last 50 m of each spray pass. To maintain uniform coverage, additional headland passes may be required at the beginning and end of each flight pass (see Figure 7).
Figure 7 – Swath width changes due to acceleration and deceleration.
Recordkeeping
Detailed recordkeeping will help operators better understand how operational and agronomic use cases affect the outcome of a spray mission. Quality records also help mitigate against any allegations of misapplication, such as a drift complaint. The following items should be recorded, but the list is not exhaustive:
Product name(s), rate(s) and water volume.
Sprayer operational settings (altitude, speed, route spacing, droplet size to supplement a digital record of the mission)
Swath measurements
Weather conditions
Note of buffers and sensitive areas
Crew names and roles
Unusual events or corrections
Results (return to site to assess efficacy)
Conclusion
Drone technology is advancing rapidly, and best management practices will continue to evolve with new research and more experience. However, the principles in this document—proper preparation, careful mixing, responsible application, diligent maintenance, environmental awareness and swath testing—apply regardless of model or agronomic use case.
Operators must ensure they are properly licensed and comply with all applicable federal and provincial requirements, including those related to the sale, use, transportation, storage and disposal of pesticides. With thoughtful planning, practice and recordkeeping, drones can be a safe and effective means of crop protection.
Thanks to Dr. Steve Li (Auburn University, College of Agriculture) and Dr. Michael Reinke (Michigan State University Extension) for their review of, and contribution to, this article.
Best Management Practices for Safe and Effective Application of Pesticides Using Unmanned Aerial Spray Systems (UASS). Unmanned Aerial Pesticide Application System Task Force, Sep. 2024.
The scuttlebut on coffee row is that acidifying a spray mixture improves its efficacy. There are also claims that pesticides break down in the sprayer tank if the pH is too high.
But it’s not that simple. Low pH has a strong impact on pesticide solubility, and that means mixing and cleanout are affected. Acidifying the mixture can have profound negative effects for many products.
It’s important to know what you’re doing.
What is pH?
pH is defined as the negative log of the molar concentration of hydrogen ions in a water-based solution. The more abundant the hydrogen, the lower the pH. It’s a log scale, so every unit of pH refers to a 10-fold change in the concentration of hydrogen ions.
Both very low (acidic) or very high (basic) pH can be caustic. But having a low or high pH doesn’t mean it will burn your skin or clothes right away, it might just be a bit unpleasant. But at the extreme ends, protection is needed.
Why is pH Important in Spray Mixtures?
In spraying, the main effect of pH is on the pesticide’s solubility. Solubility matters when mixing and becomes important during cleanout as well.
A minor effect on pH, at least for herbicides, is on chemical breakdown, usually through hydrolysis, when the pH is too high. The effect on breakdown is rarely meaningful during any given spray day, but may play a role if a spray mix is stored overnight or longer.
The Basics: Strong vs Weak Acids
Strong acids like hydrochloric acid (HCl) ionize completely in solution. When added to water, only H+ and Cl– are present, there is no HCl. The water’s pH does not affect solubility of a strong acid.
But weak acids do not completely ionize. The water pH affects the degree of ionization and therefore solubility.
Most herbicides are weak acids. A weak acid is one that does not dissociate completely in solution. A typical example of a weak acid functional group is carboxylic acid (-COOH). In solution, compounds with a carboxylic moiety exist in an equilibrium, with some as -COOH (containing the hydrogen, also called “protonated”) and others as -COO– and H+. In the dissociated form, the acid is more water soluble than in its protonated form due to the negative charge that makes it ionic.
Weak acids have a dissociation constant known as the pKa. When the solution is at the molecule’s pKa, the acid is 50% dissociated. When the solution has a lower pH than the pKa, there is less dissociation and the protonated forms of the molecule dominate. That has two important implications for herbicides.
the molecule becomes less water-soluble at lower pH
the molecule has fewer opportunities to interact with positively charged items
pH Dependent Solubility
Water-solubility is a two-edged sword. On the one hand, having a highly water soluble product makes it easier to dissolve in water. This pays dividends when mixing a batch or cleaning a sprayer because a product formulated as a solution will easily go into a true solution and will stay mixed. Examples are glyphosate, glufosinate, and salts of 2,4-D, MCPA, and dicamba.
On the other hand, most pesticides need to enter a plant to reach their site of action. And a plant cell, with its waxy cuticle and oily membranes, creates an effective barrier for water, and for water-loving molecules dissolved in it. As a result, a formulation that allows the water-soluble product to interact with an oily barrier is needed.
The products that can do this are surfactants. Acting like detergents, surfactants have regions in their structure that are oil-loving (lipophilic) and other regions that are water-loving (hydrophilic). Surfactants can therefore bind to both oil and water and provide a bridge for water-soluble products across oily barriers.
That’s also one of the reason that the most water-soluble products such as glyphosate and glufosinate contain a lot of surfactants in their formulation, reducing the concentration of active ingredient in the jug and possibly leading to foaming with agitation.
Pesticides have a wide range of solubilities, and for some, water pH will play an important role. Below is a table of some water solubilities of selected herbicides.
Solubility (ppm)
Trade Name
Active Ingredient
Mode of Action Group
pH ~ 5
pH ~ 7
pH ~ 9
Select
clethodim
1
53
5,450
58,900
Ally 2
metsulfuron
2
550
2,800
313,000
Express
tribenuron
2
48
2,040
18,300
Pinnacle
thifensulfuron
2
223
2,240
8,830
Everest
flucarbazone
2
44,000
44,000
44,000
Simplicity
pyroxsulam
2
16
32,000
13,700
Frontline
florasulam
2
0.1
6
94
Varro
thiencarbazone
2
172
436
417
Raptor
imazamox
2
116,000
>626,000
>628,000
Pursuit
imazethapyr
2
2,570
12,870
7,500
2,4-D
2,4-D salt
4
29,934
44,558
43,134
dicamba
dicamba salt
4
>250,000
>250,000
>250,000
Roundup
glyphosate
9
>500,000
>500,000
>500,000
Liberty
glufosinate
10
>500,000
>500,000
>500,000
Heat
saflufenacil
14
30
2,100
>5000
Distinct
diflufenzopyr
19
63
5,900
10,550
Infinity
pyrasulfatole
27
4,200
69,100
49,000
Compare the solubility at pH 7 to that at pH 5. For most of these herbicides, water solubility is worse at lower pH. That is because they are more protonated and become more lipophilic.
I’ve placed a lot of Group 2 products in this table because those products are most often implicated in tank cleanout issues. All Group 2 products in this table, with the exception of Everest (flucarbazone-sodium) have lower solubility at pH 5 than they do at pH 7. For some, like pyroxsulam and floarsulam, it’s a big change. Those products, when acifified, are prime candidates for poor mixability and poor cleanout.
When it comes to dicamba, low pH has another side-effect. It makes the molecule more volatile, increasing danger to sensitive plants nearby. For that reason, acidification of dicamba in its Xtendimax and Engenia formulations is not permitted.
Note that the Group 4 examples, 2,4-D salt and dicamba salt, as well as glyphosate and glufosinate, are highly water-soluble and pH has very little effect on that.
Particularly for glyphosate, the claim that it becomes more oily at low pH and will therefore be taken up more easily, is not supported by these data. Considering that the most acidic pKa for glyphosate (it has four acidic groups) is 0.8, pH would need to be much lower for any noticeable impact on oilyness.
Tank Mixability
Given today’s environment of herbicide resistance, applications with multiple mode of action tank mixes are very common. Acidifying a spray mix to benefit one herbicide may create problems for its tank mix partners.
If there is a concern that spray water is too alkaline, it is recommended that the pH of the finished spray mix be measured. Since many herbicides are weak acids, they will lower the pH of the mixture by themselves. For example, the addition of glyphosate to water with pH 7.5 will drop the pH to about 5 or so, depending on the water’s buffering capacity.
As a result, glyphosate tank mix partners that are pH sensitive may suffer in the presence of glyphosate, and pH may actually need to be raised.
pH Dependent Half-life
Herbicides
There are a lot of claims that pesticides break down rapidly in alkaline spray water. And yet, in my career working primarily with herbicides, I do not recall this ever being a problem in practice.
Below is a table of herbicides for which I could find half-life information, with the help of this comprehensive list produced by Michigan State University.
Product
Active ingredient
Half Life
Atrazine
atrazine
More stable at high pH
Banvel
dicamba
Stable at pH 5 – 6
Bromoxynil
bromoxynil
pH 5 = 34 d; pH 9 = 1.7 d
Fusilade
fluazifop-p-butyl
pH 4.5 = 455 d; pH 9 = 17 d
Liberty
glufosinate-ammonium
Stable over wide range of pH
Gramoxone
paraquat
Not stable at pH above 7
Reglone
diquat
pH 5 = 178 d; pH 7 = 158 d; pH 9 = 34 d
MCPA
MCPA
pH 9 = < 5 days
Poast
sethoxydim
Stable at pH 4.0 to 10
Princep
simazine
pH 4.5 = 20 d; pH 5 = 96 d; pH 9 = 24 d
Prowl
pendimethalin
Stable over a wide range of pH values
Roundup
glyphosate
Stable over a wide range of pH values
Treflan
triflularin
Stable over a wide range of pH values
2,4-D
2,4-D
Stable at pH 4.5 to 7
Note that all of the herbicides are relatively stable. Some are a bit less stable at high pH, but none of the listed herbicides is in danger of breaking down on the day it is being applied. Only one is actually unstable at high pH – paraquat, a herbicide no longer registered in Canada and resticted in many other countries. Those with short half-lives experience them at quite high pH which are rarely seen in practice.
Insecticides
Insecticides are a different story. Several are very sensitive to pH. This table is again adapted from a comprehensive list published by Michigan State University, here.
Among insecticides, dimethoate, amitraz, and malathion stand out as breaking down rapidly in alkaline water. For these products in particular, it may be important to acifify the spray mix if there is any delay in spraying.
Recommendations
I’ve never been a fan of messing with solution pH unless recommended on the product label. Even when there is evidence that lower pH improves efficacy, consider the impact on tank mix partners.
We’ve seen improvements in solubility and tank cleranout of Group 2 products with raised pH, and ammonia is the most cost-effective way to achieve that. But again, following label recommendations is strongly recommended. The consequences of changes in pH, particularly acifification, can be very detrimental. To be safe, consider doing a jar test before committing to a whole tank to a pH adjustment.
Most operators assume drone swath widths are wide, stable, and predictable. That confidence generally comes from three places:
Manufacturer specs, often broad, vague and dependent on working conditions, not to mention each drone model is different, and even two drones of the same model behave differently.
Single point calibrations (water sensitive paper, Swath Gobbler, etc.) that are useful and display a 1-dimensional point-in-time snapshot of the swath.
“Looks good from the ground.” Watching a plume from below often makes it feel wider than it is.
But drones move through space and time; spray patterns evolve as they fly. What you think is happening in the two seconds you glance up is not what’s happening over a 50 metre pass. The following video shows a multi-drone comparison where three drones apply 20, 50 and 100 L/ha.
Why Single Point Methods Fall Short
This isn’t a criticism. Water sensitive paper (WSP) cards and tools like Swath Gobbler™ are valuable. But they are 1-D snapshots of a 2-D, time-evolving problem. WSP captures a moment, not a pattern. Swath Gobbler™ helps visualize centre mass but can’t show edge dynamics or how edges wander along the pass.
Real deposition and uniformity depend on:
Flight parameters (altitude, speed, droplet size)
Ground or crop size and shape
Path stability and lane keeping of the aircraft
Continuous micro corrections the aircraft makes
Gusts, even in “light” wind
Onboard wind compensation behaviour
We noticed an observation from the field: gusts → aircraft corrections → amplified drift. If a left-side gust pushes the aircraft, the autopilot often dips into the wind to hold course. The nozzles are mounted to the airframe, so that slight tilt can direct spray downwind, in the same direction the gust is pushing, amplifying drift rather than cancelling it.
Hidden Message: Many operators are doing their homework. At SDEUC 2026, I was impressed by how many pilots were calibrating and said they “knew” their drone’s pattern. My data suggests your drone may be subtly lying to you – its pattern shifts as it moves through air over distance.
What Happens Over 50 m: The Swath You Weren’t Expecting
The setup matters, because without context, a lot of people will assume the pattern you’re about to see is an artifact. It’s not. It’s the result of a controlled, repeatable field experiment designed specifically to expose real-world swath behaviour.
During August–September 2024, we conducted clopyralid herbicide application trials in soybean, a crop that is extremely sensitive to clopyralid. Even a trace amount causes clear visual symptoms four weeks after application, which makes soybean a perfect bio indicator of spray deposition. (I jokingly call this sensitivity the “touch of death” because it reveals every detail.)
We used a DJI T50 to apply Lontrel™ XC (clopyralid) at the highest labeled rate (300 g ae/ha) across three water volumes (20, 50, 100 L/ha) over 100 m long field plots. From each pass, a continuous 50 metre analysis zone was extracted to see how the swath behaved over distance (Table 1).
Category
Details
Crop
Crop Soybean (highly sensitive to clopyralid, ideal for visualizing deposition)
Herbicide
Lontrel™ XC (clopyralid) @ 300 g ae/ha (highest labeled rate)
Equipment
DJI Agras T50 with rotary atomizers
Spray Altitude
3 m above canopy
Water Volumes
20 L/ha, 50 L/ha, 100 L/ha
Droplet Size
300 µm (rotary atomizer setting)
Flight Speeds Achieved
~7.0 m/s (20 L/ha), ~6.9 m/s (50 L/ha), ~4.2 m/s (100 L/ha)
Plot Dimensions
10 m wide × up to 110 m long (location dependent)
Analysis Window
Central 50 m (avoids acceleration/deceleration effects)
Wind
~5 km/h (cross wind)
Data Extraction
DroneDeploy orthomosaic → continuous 2 D swath visualization
Table 1 Key application parameters for the 50 m Swath Visualization trials
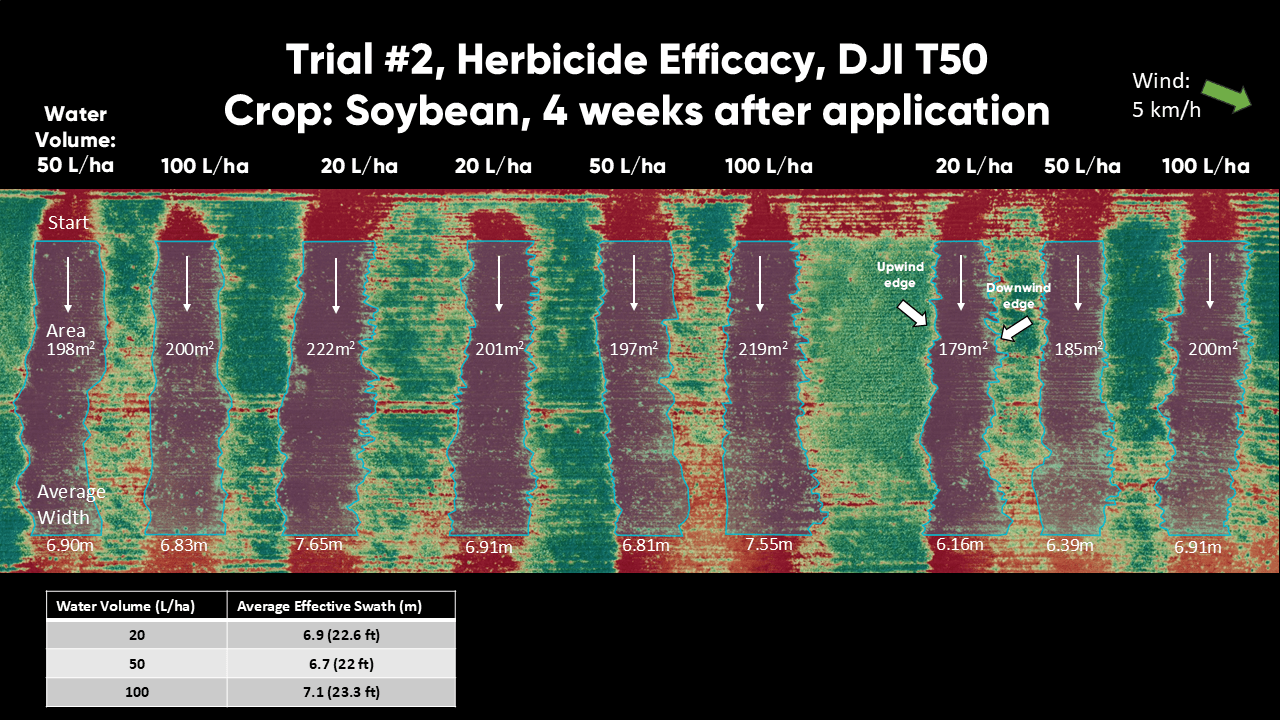
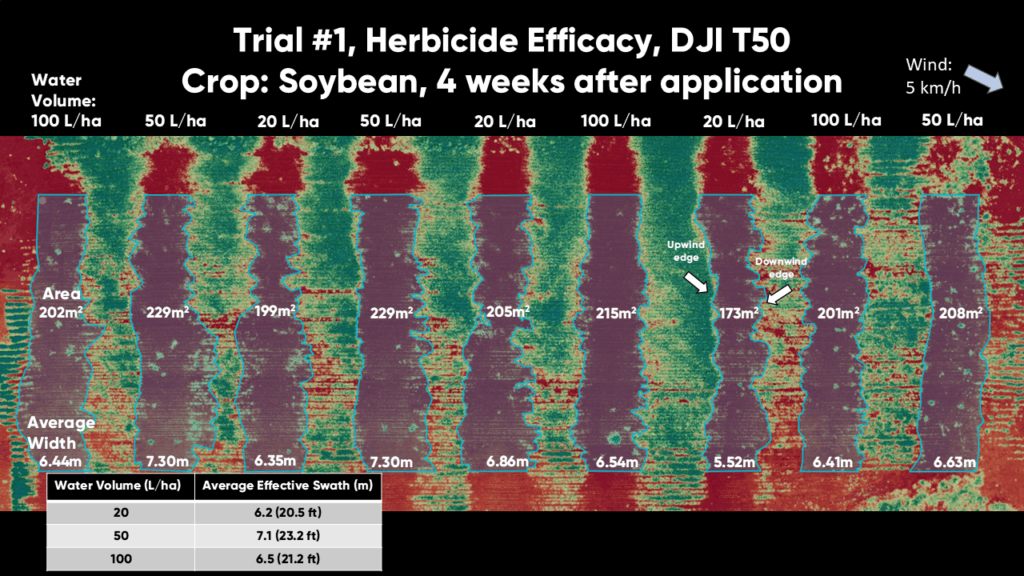
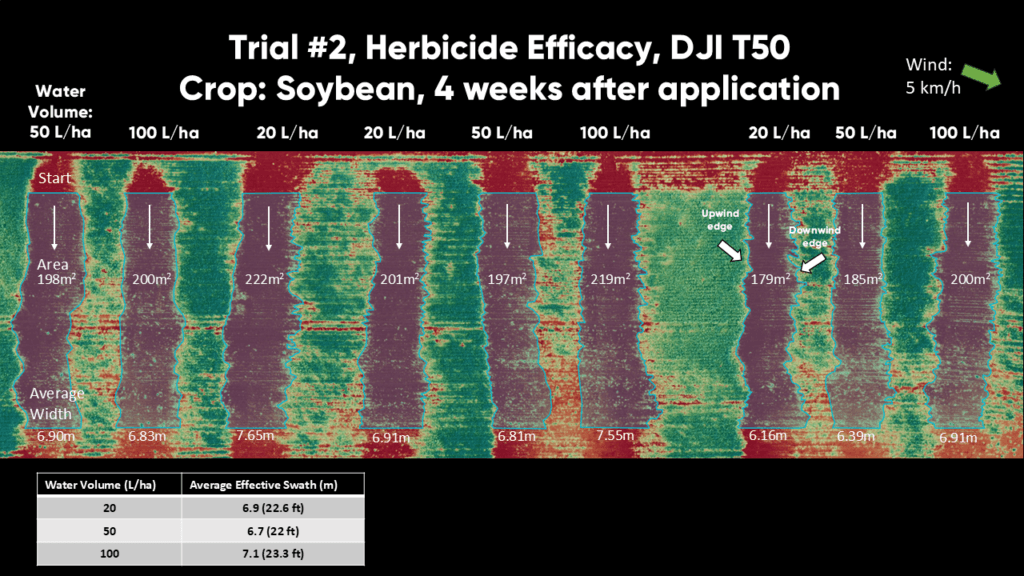
Now, here’s what the swath actually looked like over 50 m (Figures 1 and 2):
Figure 1 – 50 m continuous swath visualization, Trial 1. This stitched graphic shows annotations for upwind/downwind edges and width measurements.Figure 2 – 50 m continuous swath visualization, Trial 2. This stitched graphic shows annotations for upwind/downwind edges and width measurements.
What becomes immediately obvious is that this is not the clean, geometric ribbon many expect. Here’s what the 50 m swath showed:
Despite all the drone consistently flying north to south in a straight line, the path of efficacy isn’t consistently straight, appearing to subtly be affected by the wind.
Within the path, the edges are also not straight, the upwind edge can often appear jagged. Each “tooth” could correspond to a micro correction the drone makes to hold course. The downwind edge adds a frayed or tattered look, not as clean of a boundary, likely caused by drifting spray.
The width changes along the pass. Some sections widen, while others pinch inward. It would be unlikely to see these 2-D effects with 1-D sampling such as WSP cards.
The plume tail wanders. The airborne portion of the spray oscillates left and right in response to gusts and minor stability corrections.
The pattern is asymmetric. Left ≠ right. Upwind ≠ downwind. A drone swath is not a mirror image, and each pass is different.
The bottom line: A drone’s real swath is not a clean bar of colour, it’s an irregular coastline. And once you visualize it in 2-D over 50 m, the story becomes clear: swaths are dynamic, variable, dependent on conditions, and often narrower than manufacturer recommendations.
Why I Think It Looks Like This
It’s not that drones are bad sprayers; it’s that their reality is dynamic. 2-D imagery simply reveals what single point tools cannot:
Drones are constantly making tiny left/right/forward/back corrections to counter act the forces (mostly wind) acting on them.
The wind and the resulting corrections of the aircraft slightly change where the spray actually travels.
The downwash column shifts with the aircraft’s posture.
Even light wind (< 5 km/h) is enough to expose these shifts.
The Wandering Swath and Jagged Edge Problem: Swaths Don’t Fit Together Like Shark Teeth
This is where mis-set swath widths come back to bite. When you slide one measured swath against its neighbour, the non-linear path and jagged edges don’t interlock. Some spots show metres of overlap; others flirt with gaps. The following video shows us sliding a measured 2-D swath polygon until it just touches the neighbouring swath. Note how irregular edges force uneven overlap and occasional near misses.
Operationally, if you rely on the widest advertised swath—or on a single clean snapshot—two things happen:
Misses (especially with herbicides): escapes, patchy control.
Dose non uniformity: some areas get 0x, others 2x.
Sure, the average across 160 acres may equal the target rate, but field level uniformity is not icing-smooth.
Practical Recommendations You Can Use Tomorrow
These are observational, conservative, and based on what the 2-D data actually shows:
1. Calibrate, test in your conditions, over distance
Run a long test strip and evaluate coverage continuously (not just a few cards). Evaluate in many wind conditions, to best understand your swath variance given the situation.
2. Tighten your swaths beyond what’s stated in the brochure
Depending on the application and product, plan for more overlap than the manufacturer’s suggested swath width. Adjust from there with your own measurements.
3. Different jobs, different risk tolerance
Herbicides: misses are costly → tightest spacing.
Fungicides: somewhat more forgiving but still benefit from stability and overlap.
4. Faster (7 m/s) with lower water volume displayed more variable swath
Higher water volumes direct in a large amount of water being pushed down within the downwash resulting in less drift and more consistency. This coupled with slower flight = fewer corrections = a straighter, more consistent swath.
At ~5 m/s, droplets fall mostly into the downwash beneath the drone, deposition is close to the flight line.
At ~9 m/s, the airframe tilts forward to hold speed. The nozzles are slightly tilted back and the spray is deflected backward, it trails the drone like Superman’s cape.
Downwash is no longer straight down.
Coupled with the flight speed, the downwash is no longer pushing the spray into the canopy.
Deposition lands farther behind the drone.
Small gusts now matter more.
A backward angled plume has more side profile for crosswind to grab. The following speed comparison (same drone, two speeds) illustrates this effect:
5. Respect “light” wind
The imagery shows meaningful edge change and drift even in 5 km/h. Even the ‘gusts’ in light wind move the swath. In relatively calm days continue to watch variability, plan overlap, and validate.
Conclusion – Know the Swath You Actually Have
Drone spraying is promising and can be very effective and is getting better fast. Fit the setting with the task. If there is less room for error (herbicide), tighten those swaths to prevent misses caused by the wandering swath. Swaths are often misunderstood when we only look at single points.
When you test over distance and see the 2-D pattern:
Coverage becomes more reliable
Reduces misses
Efficacy gets consistent
Confidence rises
The first step to improving application is knowing the real shape of your swath. Tighten spacing, higher water volumes, slow down when you can, validate in your own conditions, and keep learning as the technology evolves. Spray drone technology is rapidly evolving, and many of today’s limitations will be addressed with innovation.
In the summer of 2025, Todd Frey of Clean Field Services(Drayton, Ontario) and I participated in the Elora Weeds Tour. We discussed his new John Deere See & Spray Premium and the practical considerations for implementing green‑on‑green spraying in Ontario (Figure 1). With that first season squarely in the rearview mirror, I reached out to Todd to ask about his experience.
To be clear, we had a lot of questions then and we still have questions now… but we’re optimistic. This article summarizes the original topics from the Weeds Tour, Todd’s 2025 learnings, and considerations for the year ahead.
Figure 1 – JD See and Spray Premium at the 2025 Elora Weed Tour. Todd Frey (left) and Brendan Bishop
Challenges Identified in 2025
Label Language and MRL Constraints
Optical spraying introduces uncertainties when interpreting pesticide labels written for broadcast applications. For example, an operator might elect to concentrate a herbicide beyond the common broadacre rate while technically adhering to the label. Depending on the active, this risks excessive residue levels that can cause crop replant issues. A few Canadian labels already address this grey area by specifying water-to-product ratios in addition to per‑hectare limits. Most do not.
Australia’s experience offers a possible way forward: optical systems in Australia are commonly calibrated at 100 L/ha (~10 gal/ac), and labels specify whether they permit higher concentrations for spot and patch spraying. Additionally, most labels state the operator must revert to a conventional broadcast application when fields have more than 30% weed cover.
Tendering and Mixing Logistics
Estimating product and water needs is, perhaps, one of the most difficult operational challenges. Traditional field scouting cannot accurately predict how much spray solution an optical sprayer will apply. This leads to logistics issues, increased risk of unnecessary leftovers, and subsequent disposal/clean out problems.
Nozzle Availability and Performance
Nozzle choice is central to realizing the full benefit of precision application. Ideally, operators require low‑drift, narrow‑angle nozzles with an appropriate dynamic range (i.e. travel speed vs. flow rate) to spray small weeds efficiently. Perhaps it goes without saying that a stable boom is critical in this equation, but we’ll say it anyway. Nozzle options are currently limited and we’ve written about this subject in a previous article.
Cost–Benefit Realities
While herbicide savings are an obvious appeal, the actual economics are more nuanced. The See & Spray Premium model adds a $6/acre CDN fee for unsprayed acres, which can diminish savings in very clean fields. A fall broadcast herbicide application improves the success of spring green‑on‑green passes, but this added cost must be figured in. Of course, there are many other benefits to a fall burndown that shouldn’t be dismissed, and you can read about them here.
On the other hand, perhaps good agronomy should be the motivating factor. Any savings from reduced broadcast spraying may allow operators to upgrade to more effective, higher‑value tank mixes, improving weed control and contributing to long‑term seedbank reduction. Regarding the later point, there have been recent studies that suggest using low sensitivity may adversely affect the seedbank.
New Chemistry Possibilities
It’s a stretch, but there could be a silver lining to increasing herbicide costs and resistance pressures: chemistries once considered too expensive for broadcast use could become economically viable for spot or patch applications. This would expand chemical options.
The 2025 Experience
Cost savings
To evaluate performance under Ontario conditions, Todd conducted a structured trial on his own 125‑acre corn field. In 2024 the field received a fall application targeting annual grasses and broadleaf weeds. Todd’s intention was to leave perennial sow-thistle and Canada thistle for targeted control in the spring.
He used the See & Spray Premium to apply Lontrel + glyphosate at 13 GPA. The John Deere Operations Center map (Figure 2) shows a distinct high‑pressure zone in red. This corresponds to 2–3 acres recently reclaimed for production —significantly weedier (Figure 3) than the remaining acreage (Figure 4). This work was performed using the Deere TSL8005 nozzle, with sensitivity set to 3 (medium) and buffers set to medium in both directions.
Figure 2 – John Deere Operations Center weed pressure mapFigure 3 – High weed pressure in the reclaimed section of the fieldFigure 4 – Low weed pressure in the majority of the field
Download a copy of the as‑applied data.You’ll see the See & Spray treated only 25.8% of the field. If Todd had broadcasted Lontrel at 65 mL/ac and charged his typical $14.50/ac it would have cost $4,139.36. However, even with his premium spot-spray rate of $17/ac and passing on the $6/ unsprayed acre, the total cost was $3,507.96. This represents a net savings of $631.40, and the surprise twist: he used the 100 mL rate of Lontrel and still saved money.
So, in fields with moderate but uneven perennial pressure, See & Spray Premium can produce meaningful savings while enabling more robust chemistry.
Scouting Limitations
As expected, visual scouting underestimated real weed density. Figure 4 might seem clean at first blush, but the cameras see a different story hidden in the stover (Figure 5). This is why predictive tank‑mix planning is unreliable.
Figure 5 – Weeds may hide from a scout, but not from clever optics.
Optimizing Tendering Through Job Planning
Todd found that the best approach to minimizing leftovers was to group farms with similar pre‑emerge programs and weed spectra. He would then book them from the smallest to the largest fields, allowing leftover spray mix from smaller jobs to feed into larger ones. His goal was to finish with <5 acres worth and broadcast it at the end of the last job.
This kind of planning starts with the fall burndown and should be firmly in place by March. It’s already challenging to accommodate last-minute requests during spring spraying, but this approach makes it particularly difficult.
Customer Scheduling Challenges
There was some frustration along the learning curve. A few customers experienced delays waiting on sprayer availability and then paid the premium on a field that ended up requiring a broadcast application. Experience will help refine expectations and scheduling.
Looking Ahead: 2026 and Beyond
In 2025, the See & Spray machines in Ontario sprayed mostly soybean, but in Todd’s region it was predominantly corn. One reason was that most of his soybean customers weren’t quite sold on the fall application. Todd has plans to get into soybeans in 2026, but his strategy involves IP beans.
Traditionally, IP beans get a spring application timed to catch as many weeds as possible, perhaps too late for some and too early for others. Then Todd takes his phone off the hook as customers fret over burned beans while they inevitably grow out of the visual injury. But this time, Todd will make two targeted passes with a more expensive tank mix to do a better job of controlling weeds at the right stage, while avoiding burning the IP beans. If his projections are correct, he believes he can accomplish this more economically than a single broadcast pass.
We’ll update this article with the outcome. Be sure to check back and see if he succeeds 🙂
Conclusion
Ontario’s early experience with green‑on‑green optical spraying suggests that while the technology is promising, it requires substantial logistical planning, label awareness, and nozzle optimization. Under the right conditions—particularly where weed pressure is irregular but significant—operators can achieve both economic savings and precise weed control.
As adoption increases and equipment evolves, we’ll learn more about where spot and patch spraying technology fits in changing weed management programs.
Thanks to Todd for sharing his experience and insights.